


Hallo und Willkommen in meiner Projekt Ecke.
Hier findet ihr alle meine veröffentlichten Projekte aus den unterschiedlichsten Bereichen.Diese Seite ist erst im Aufbau und wird immer wieder mal ein Stück von mir erweitert.
Ihr habt selbst etwas das ihr gerne gedruckt hättet ?
Kein Problem schreibt mir einfach eine Email mit eurer Datei im Anhang und ich schreibe euch ein Angebot dafür.Projekte
7 Segment Anzeige

Amiibo Ständer

Analoges VU-Meter
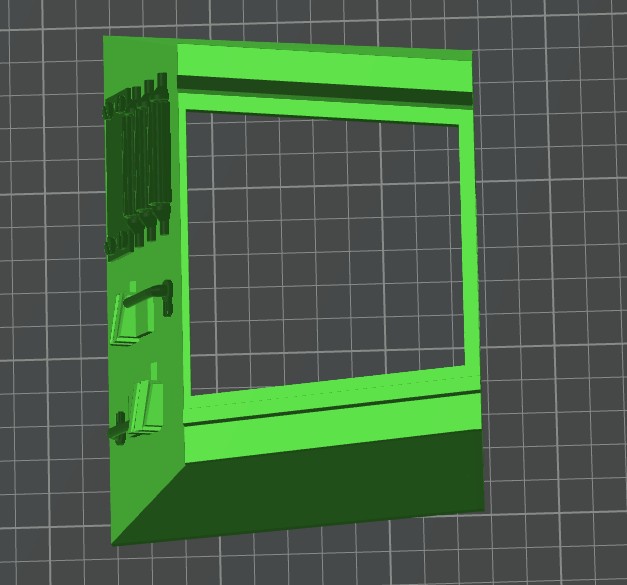
Arduino VGA Box

Back To The Future

Battleship Deluxe
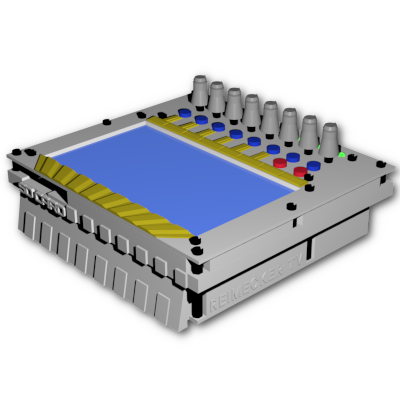
Development System

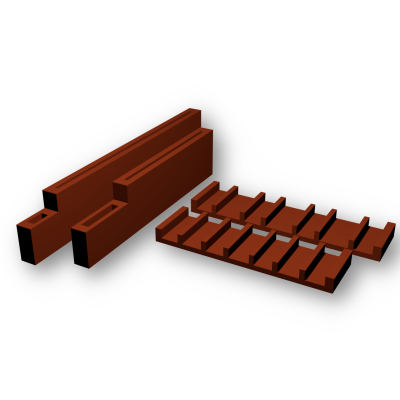
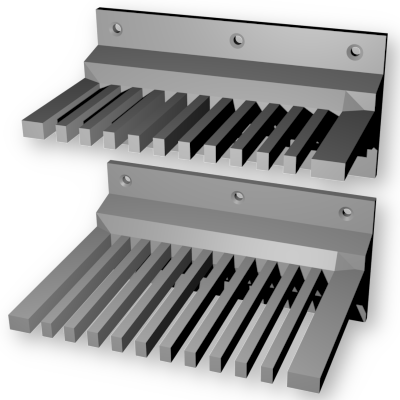
Erweiterungskarten Halter
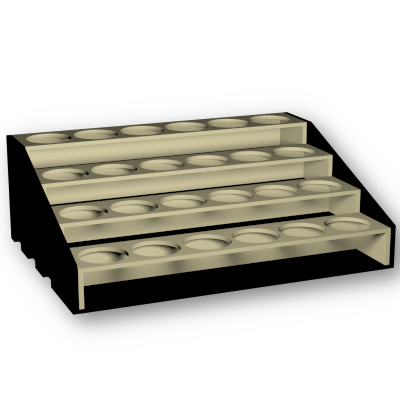
Farben Regal / Palette
Farben Ständer

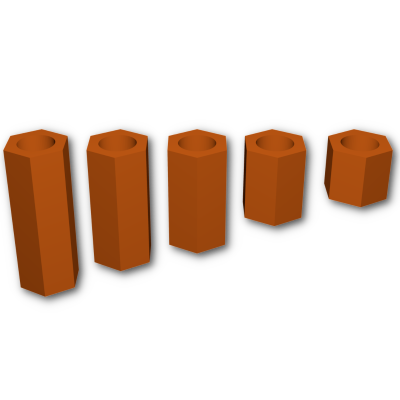
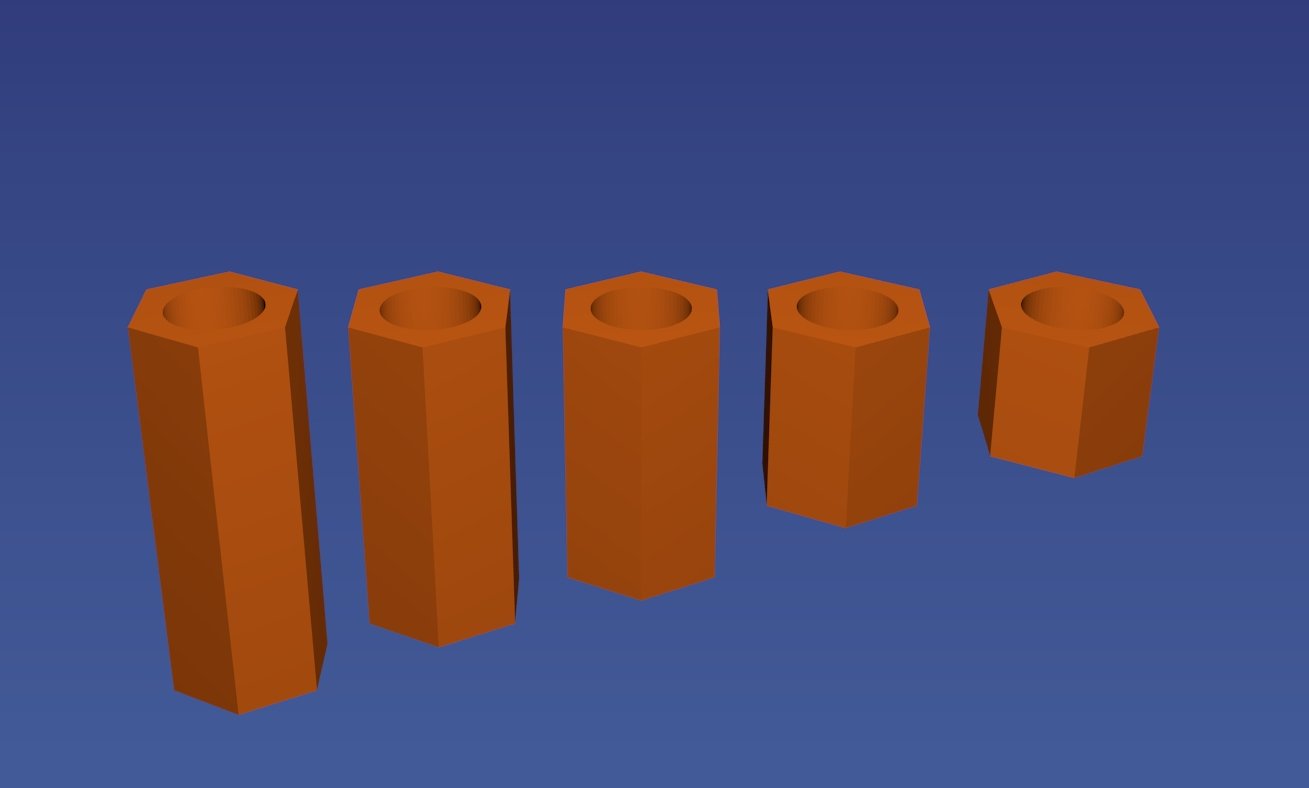
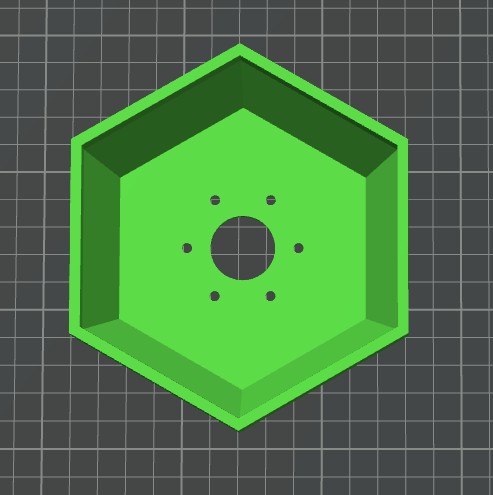
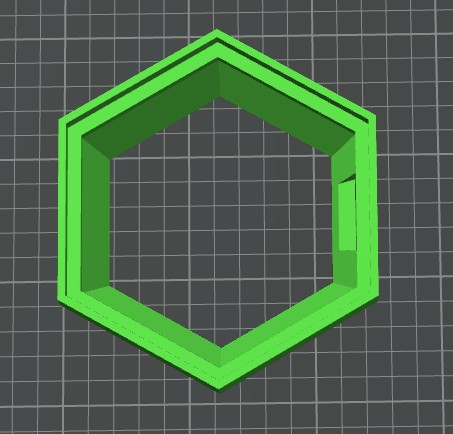
Hexagon Abstand Hülsen
Jarvis - Home Automation
Jumpwire Karussell

Kabel Manager
Lampe Led

Lampe Makerkit

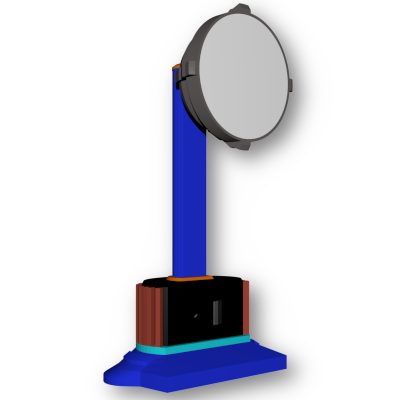
Led Spot
Mensch ärger dich nicht

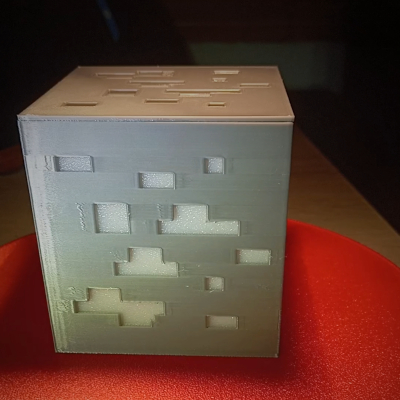
Minecraft Diamond
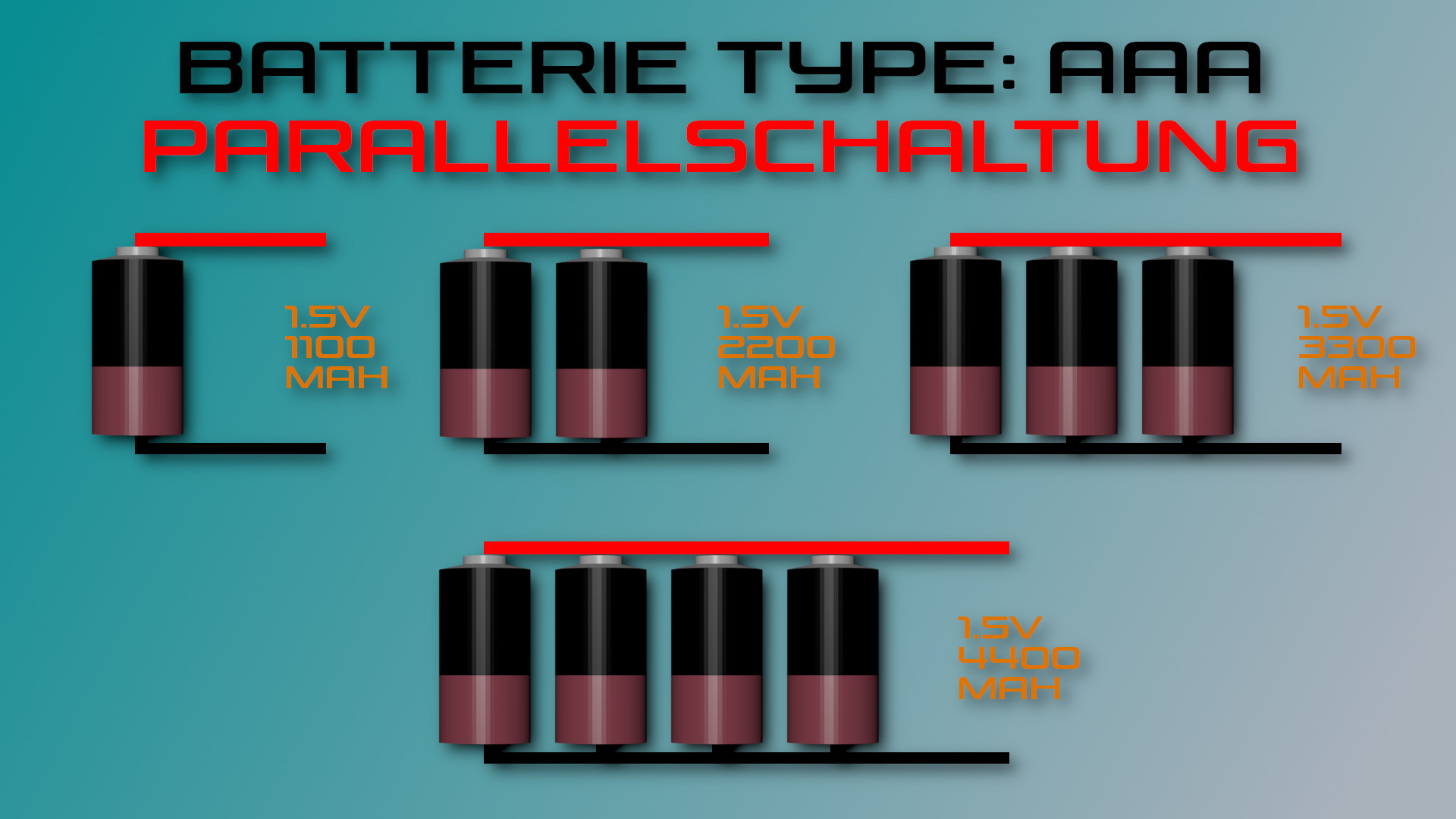
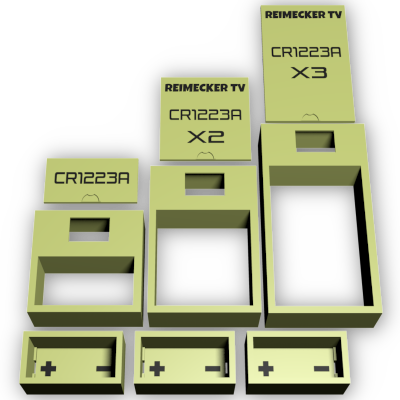
Modulares Batterie System
PrxOS - Operating System
Regal
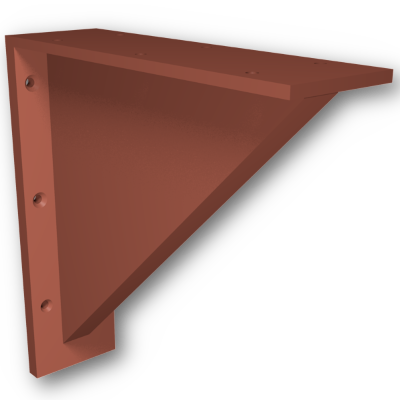
Regal Halter
Reimecker TV Logo

Requisiten Bau

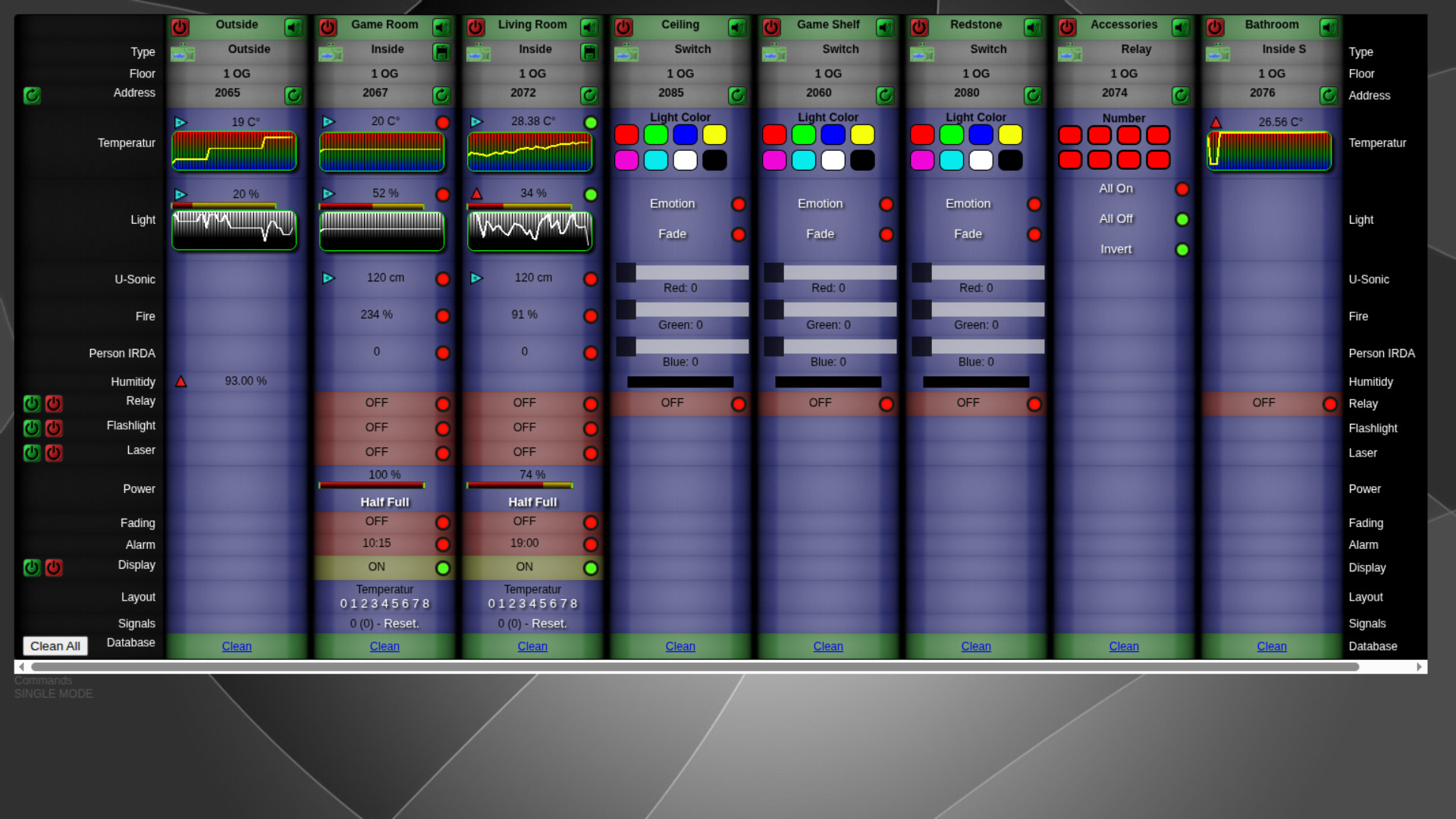
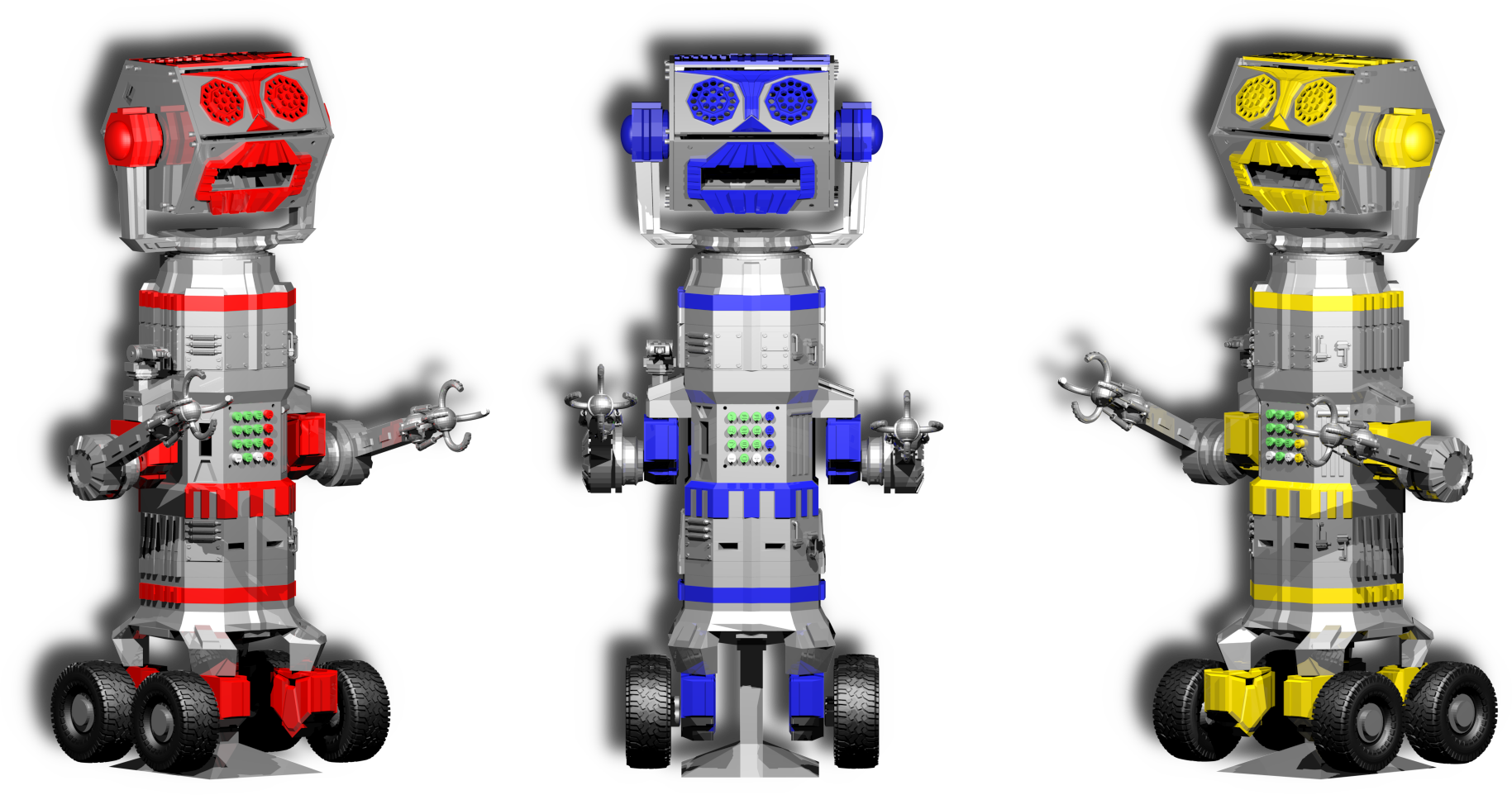
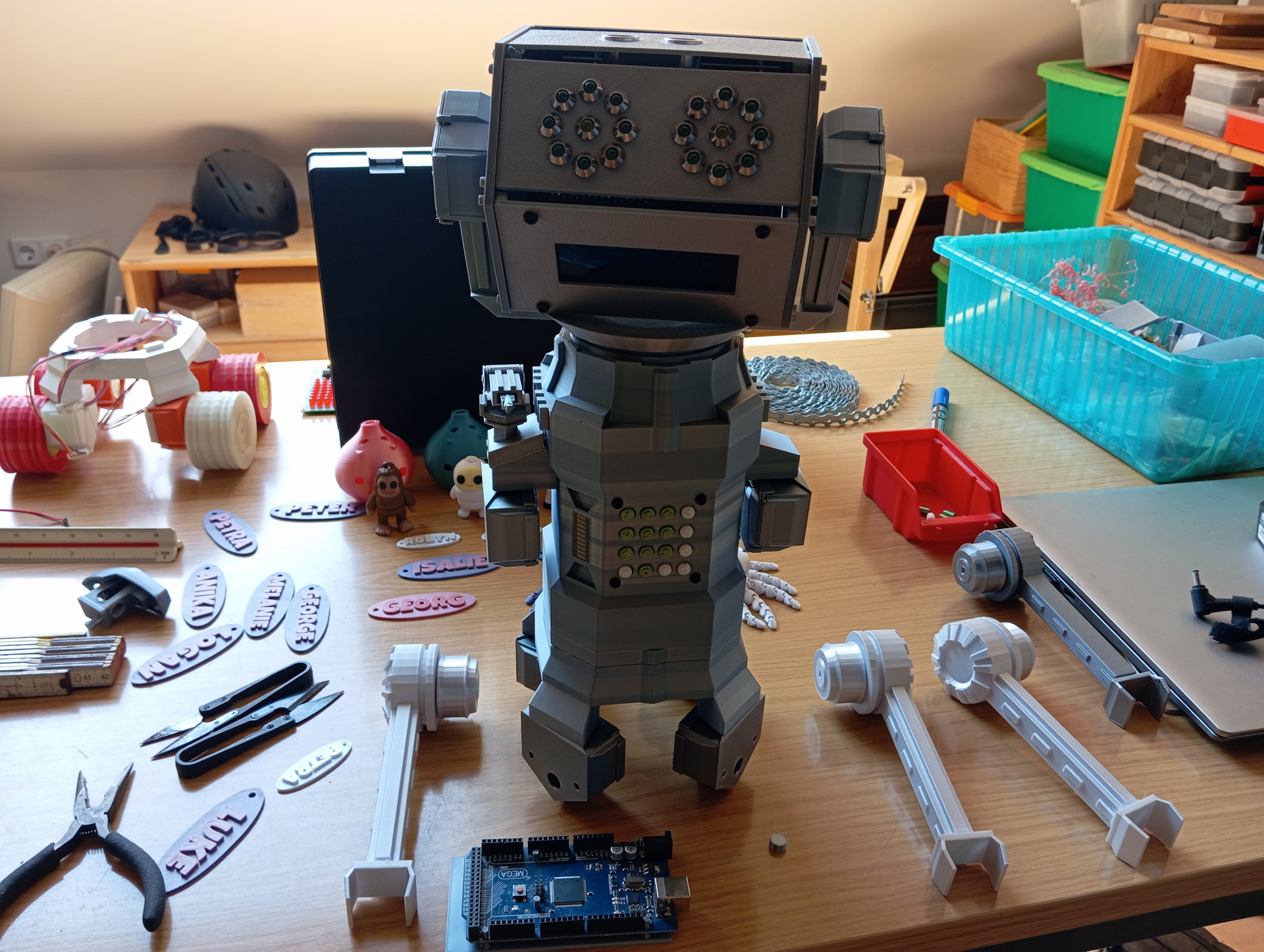
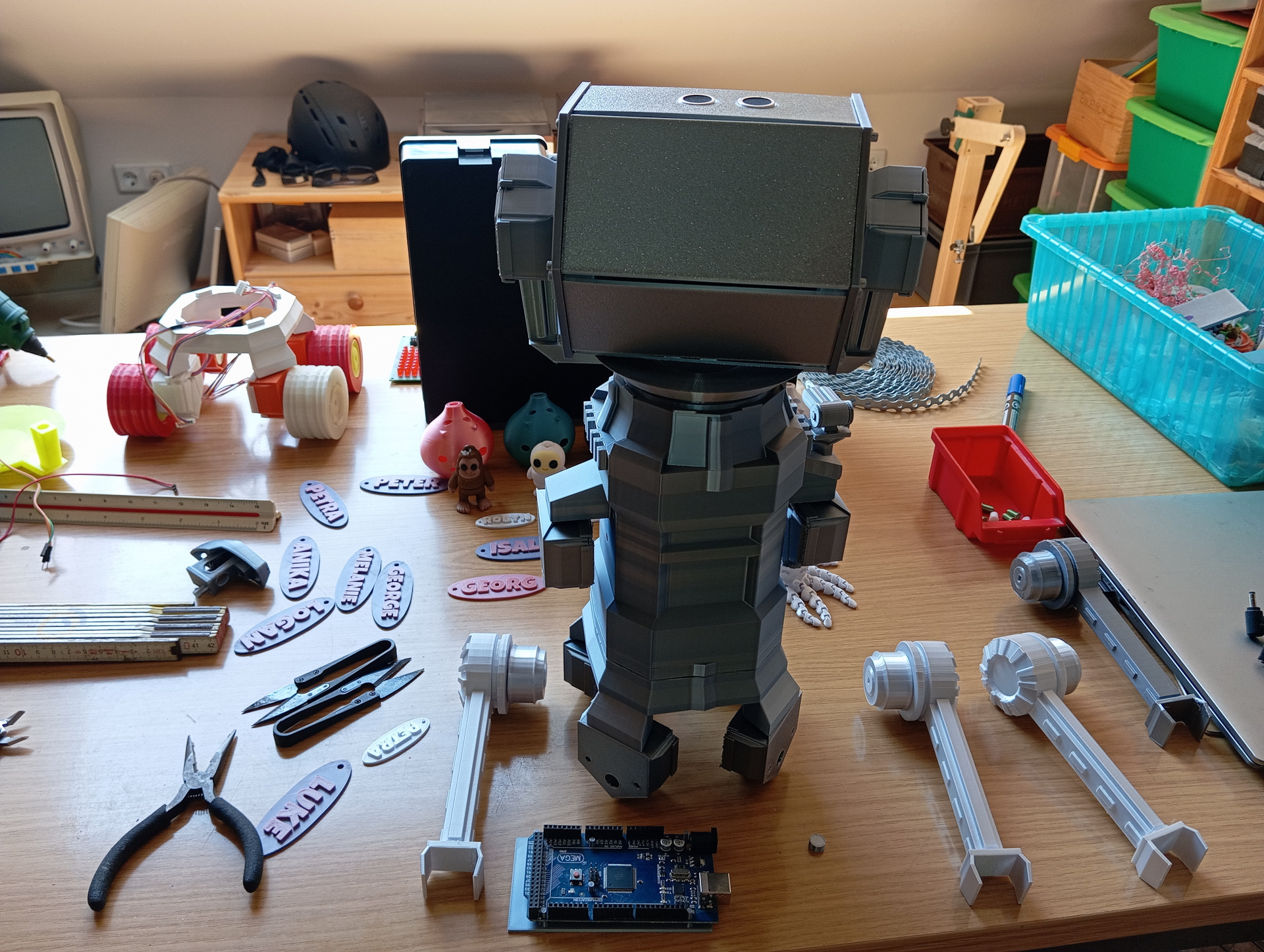
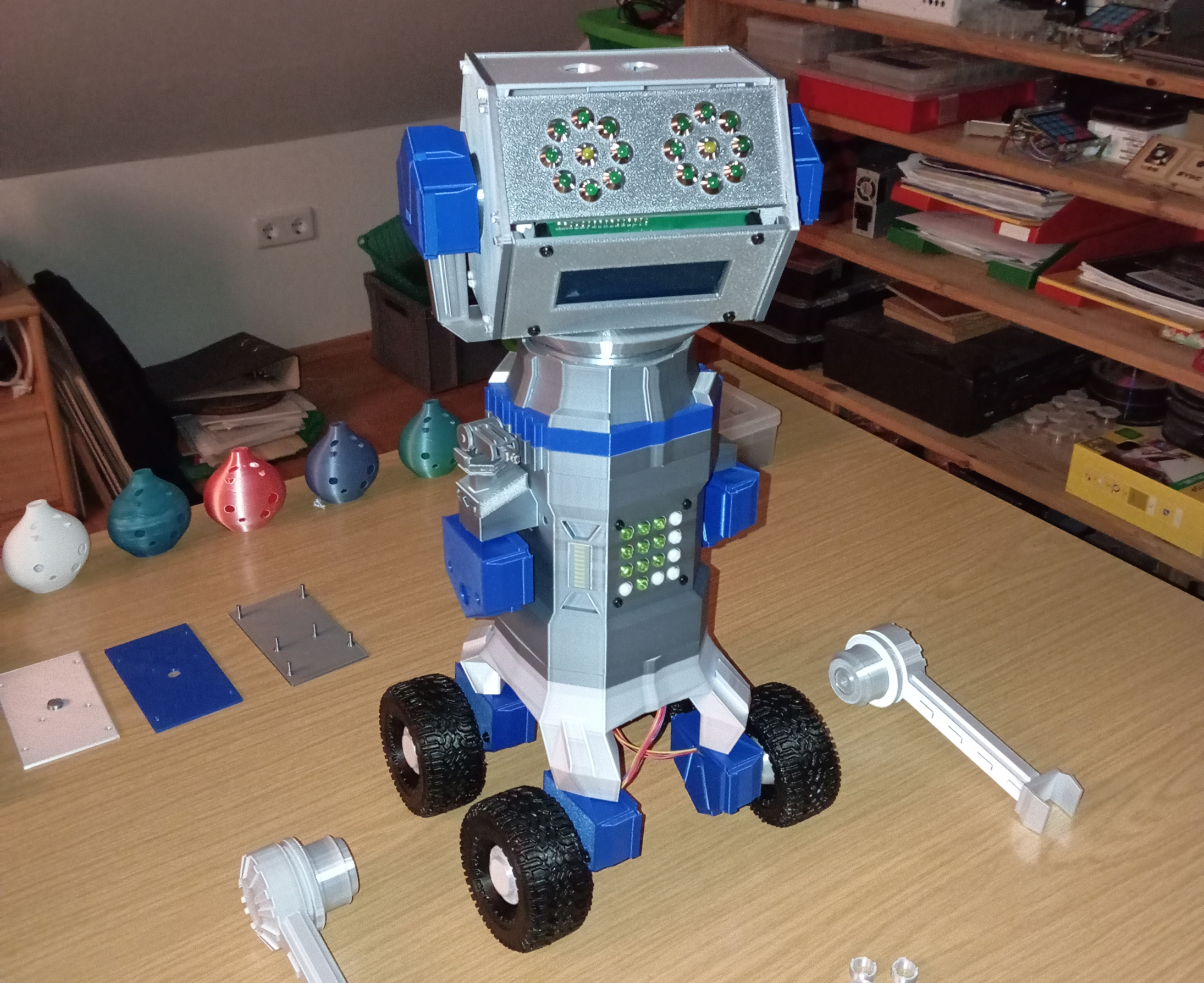
Roboter 2.0
Rund Clip
Sprite Kacheln / Tiles

Stifte Halter

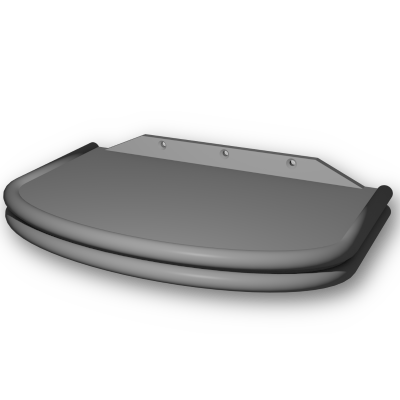
Switch Game Holder

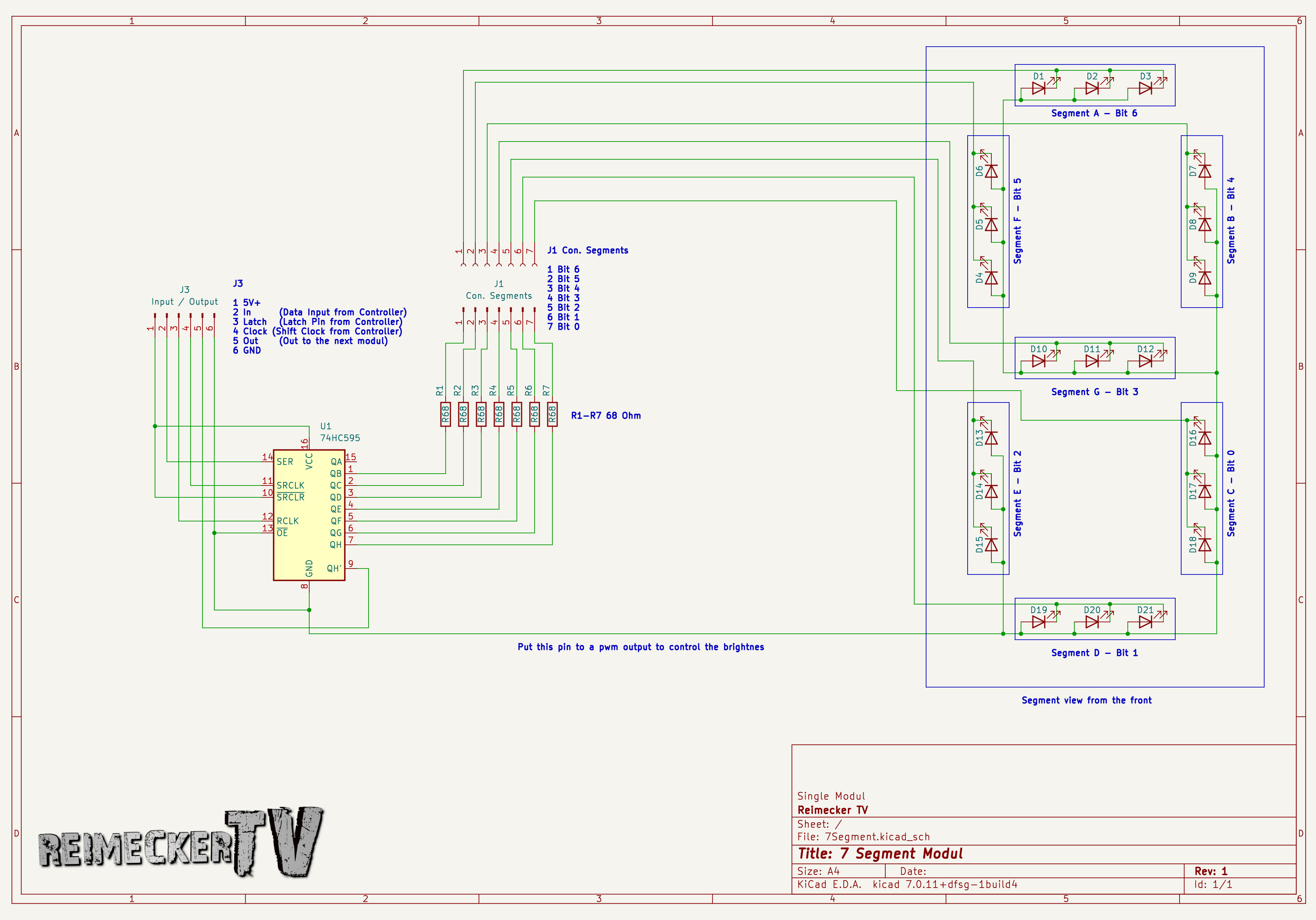
7 Segment Anzeige
Das ist ein kleines Projekt wo es darum geht eine eigene 7 Segment Anzeige zu entwerfen und diese dann in anderen Projekten zu verwenden. Ich habe darauf zum Beispiel eine Uhr gebaut.
Teile
Dokumentation
Download
Teile
Frontpanel

Das ist das Grundmodul für die 7 Segment Anzeige. Auf ihr befindet sich 7 seperate Segmente mit Platz für je 3 5mm LEDs.
Download STL
Download STL
Pcbholder
Nachdem alle LED’s in Gruppen mit einem gemeinsamen Ground verlötet sind kann man dieses Teile mittel Abstandshalter auf der Rückseite platzieren und hat darauf Platz um eine Platin unterzubringen.
Download STL
Download STL
Dokumentation
Schematic
Download
Videos
,










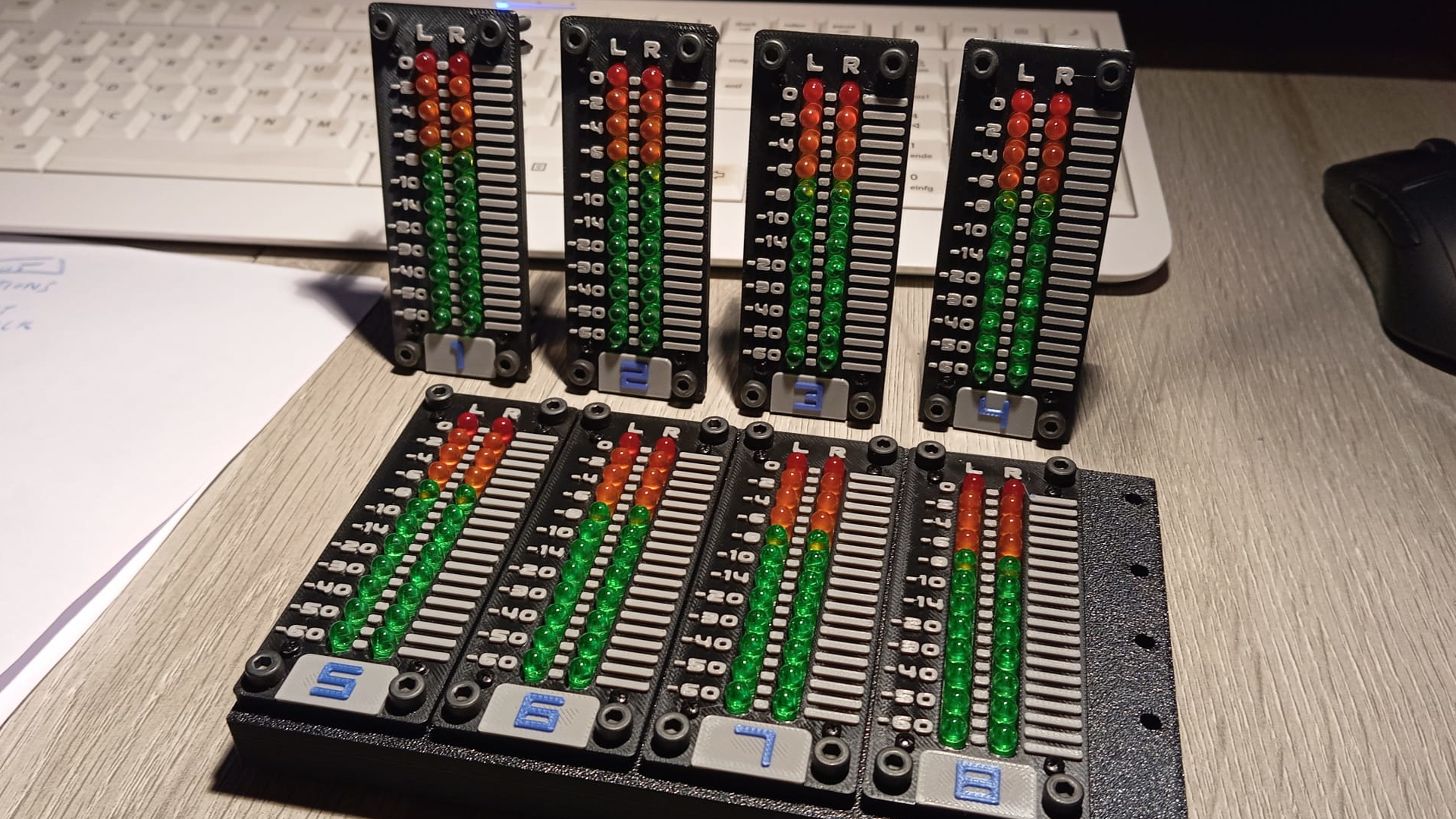
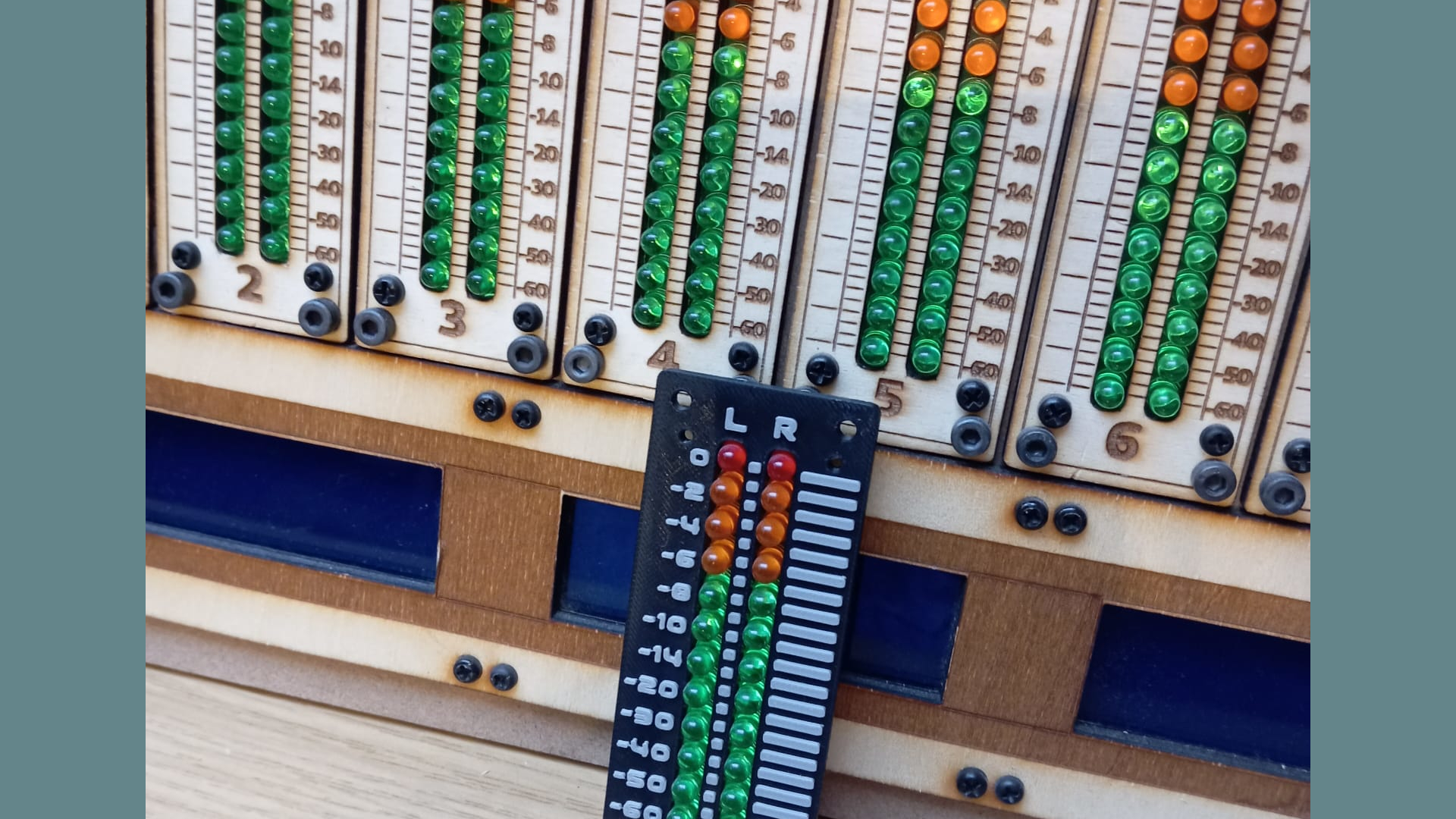
Analoges VU-Meter
Vorwort
Hardware
Dokumentation
Bilder
Download
Vorwort
Hardware
Dokumentation
Bilder





Download
Videos
,





































Arduino VGA Box
Videos
,Back To The Future
Back To The Future - Replicas


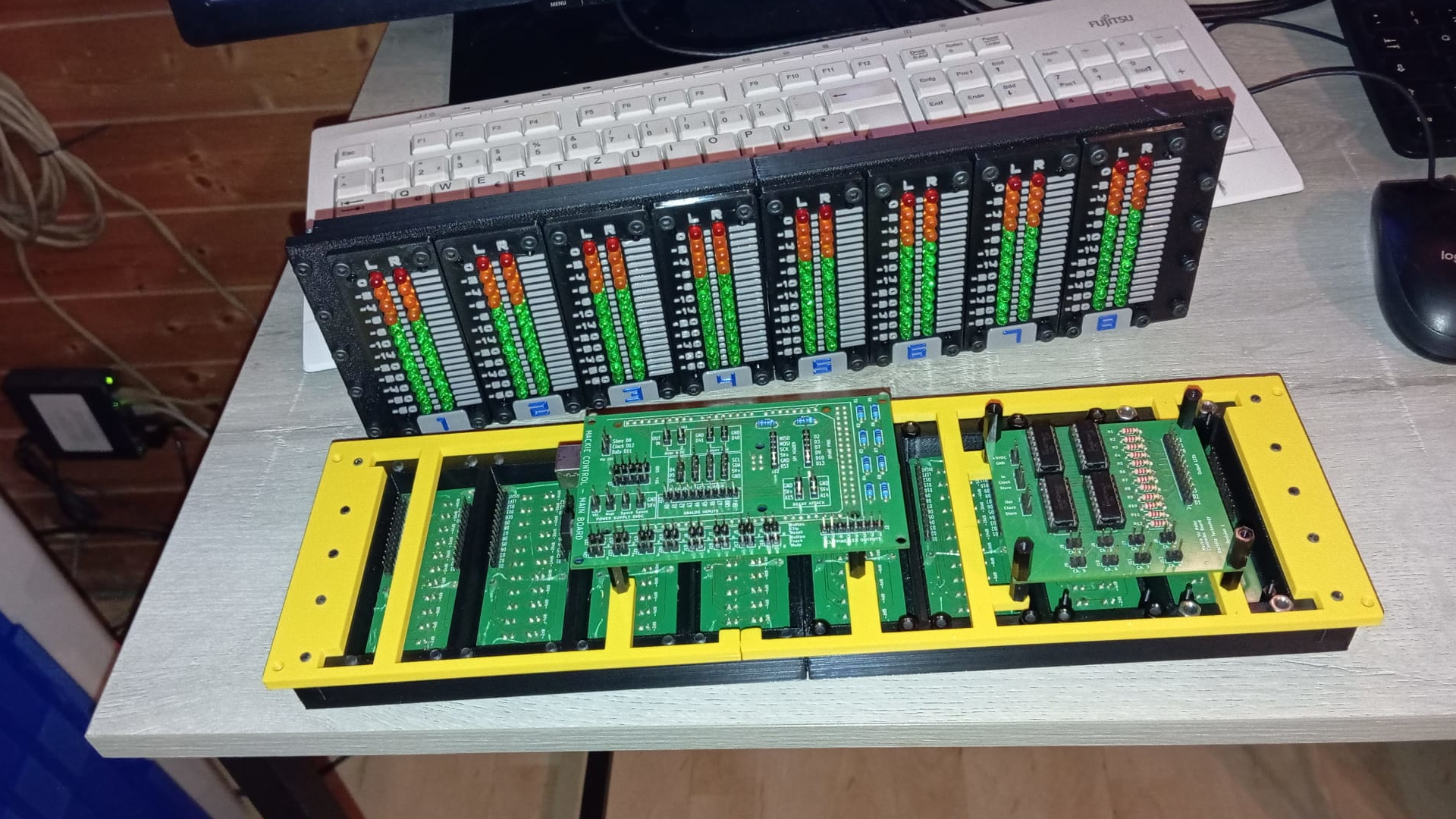
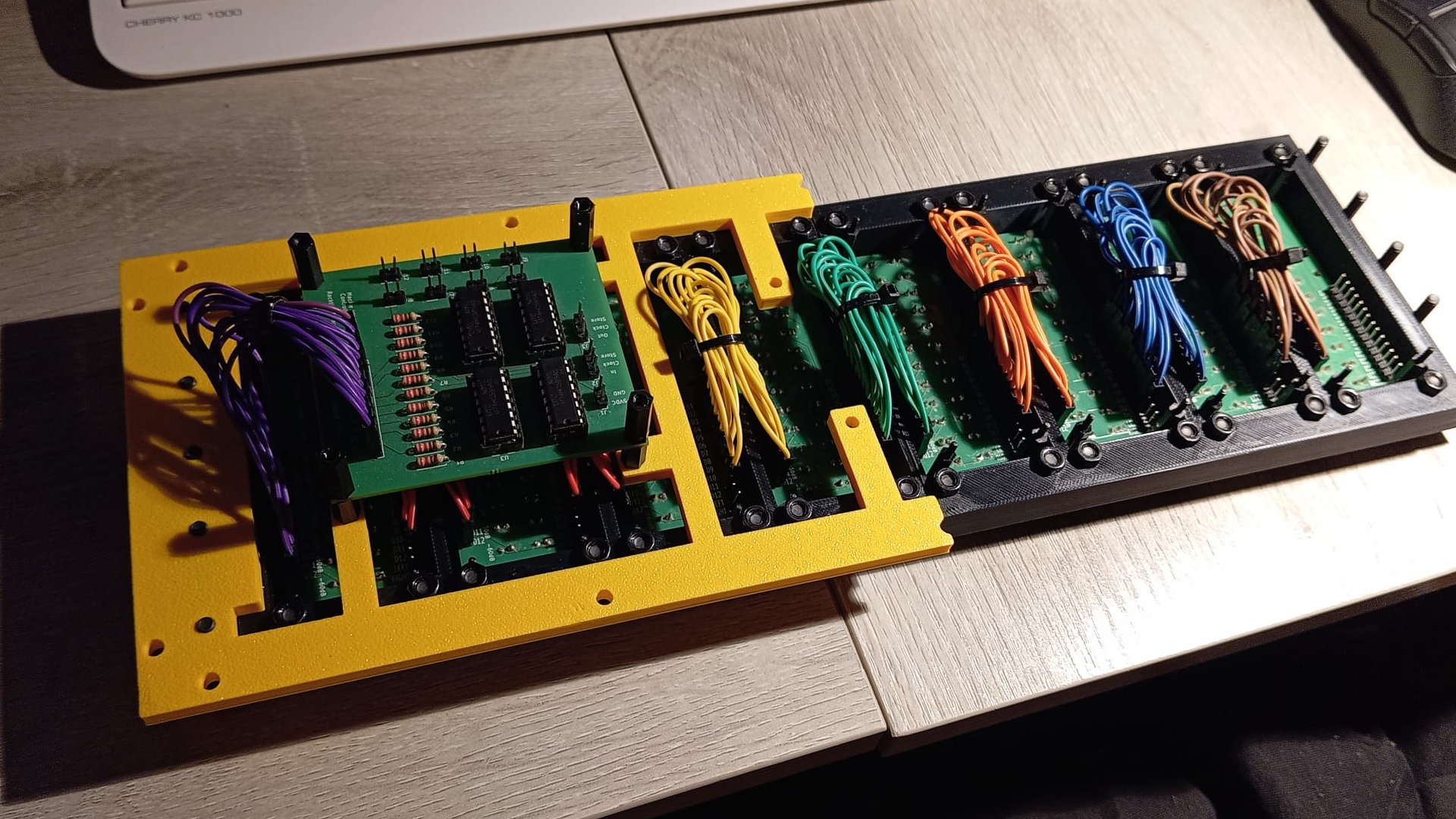
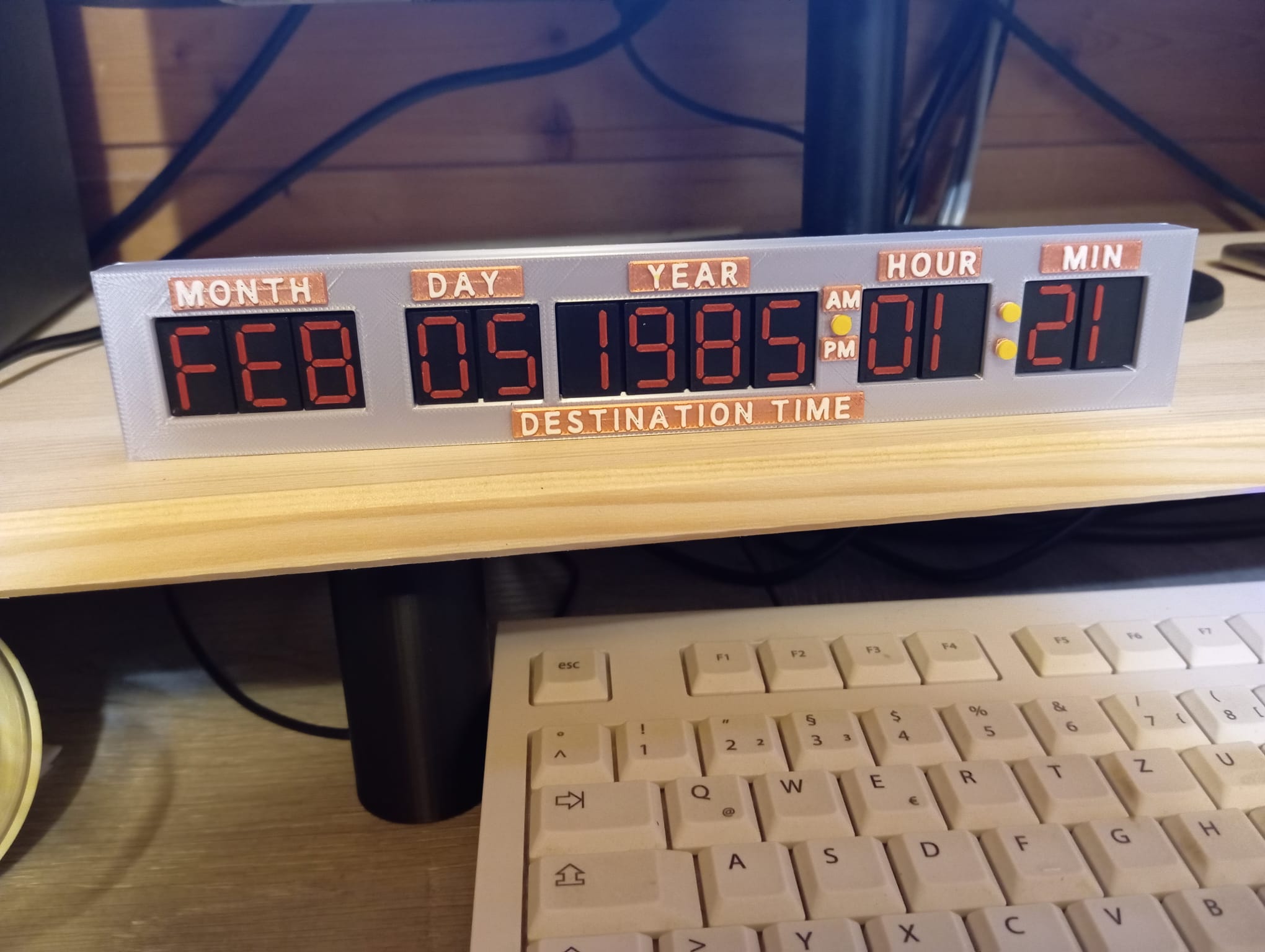
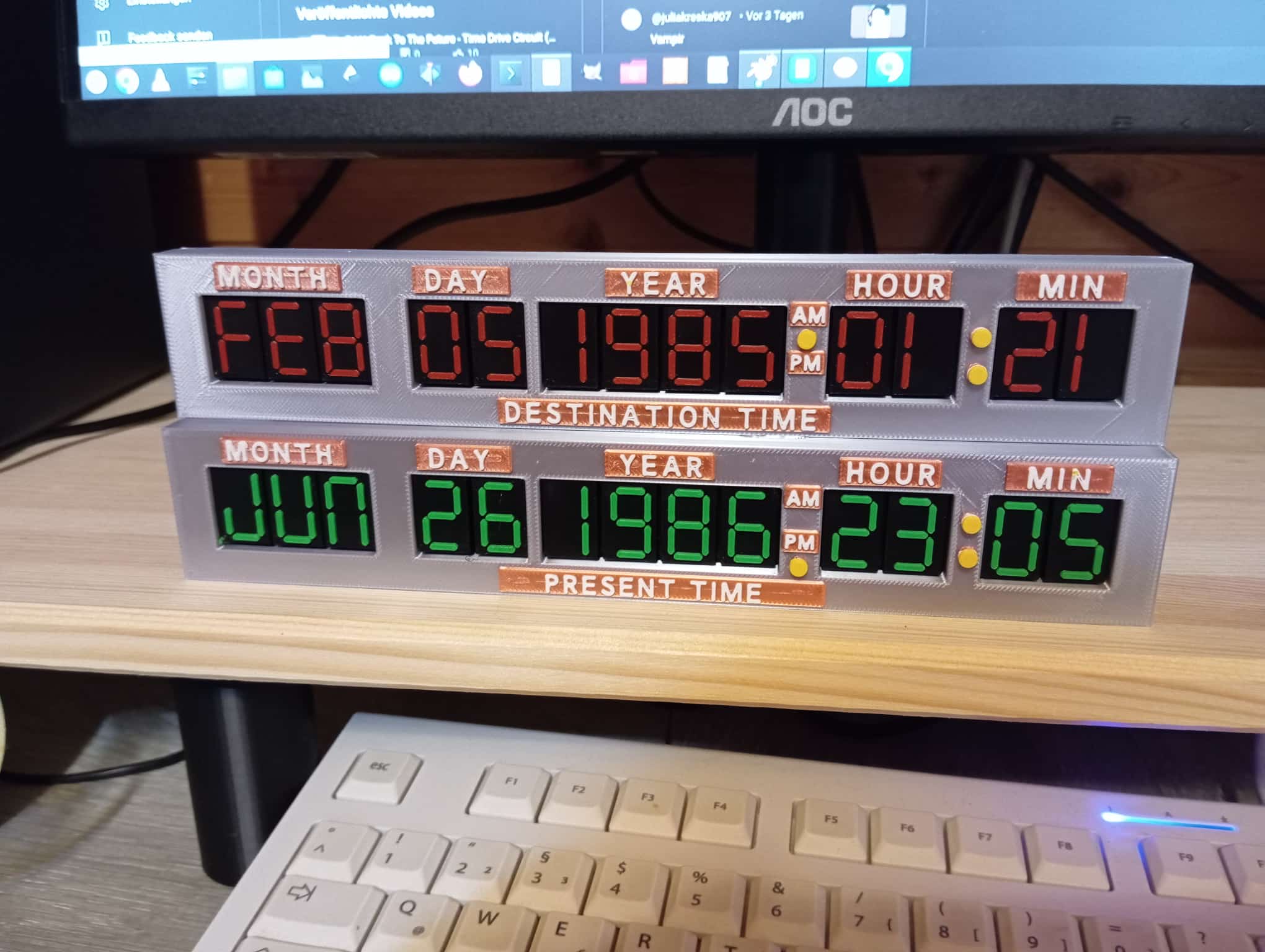
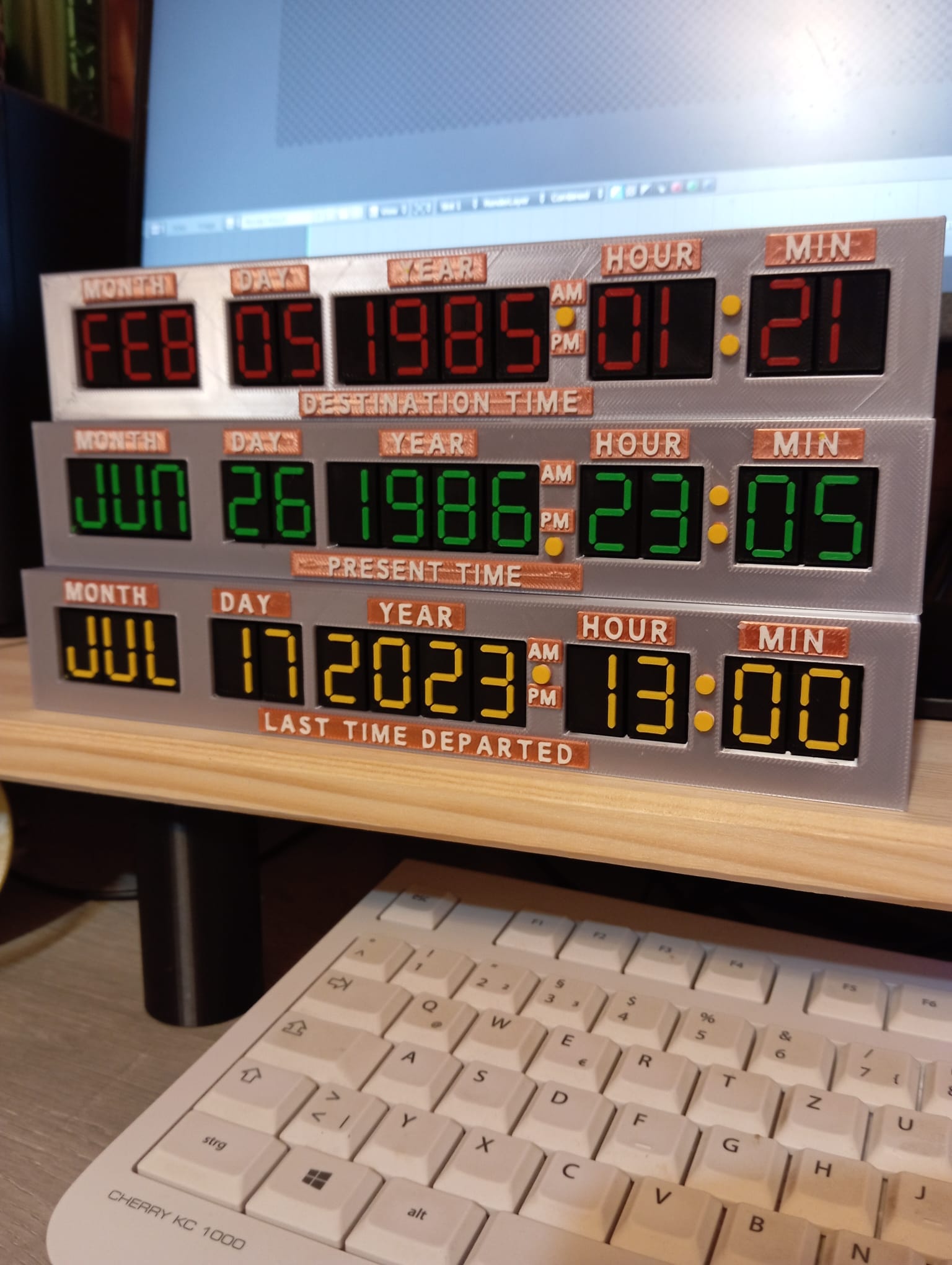
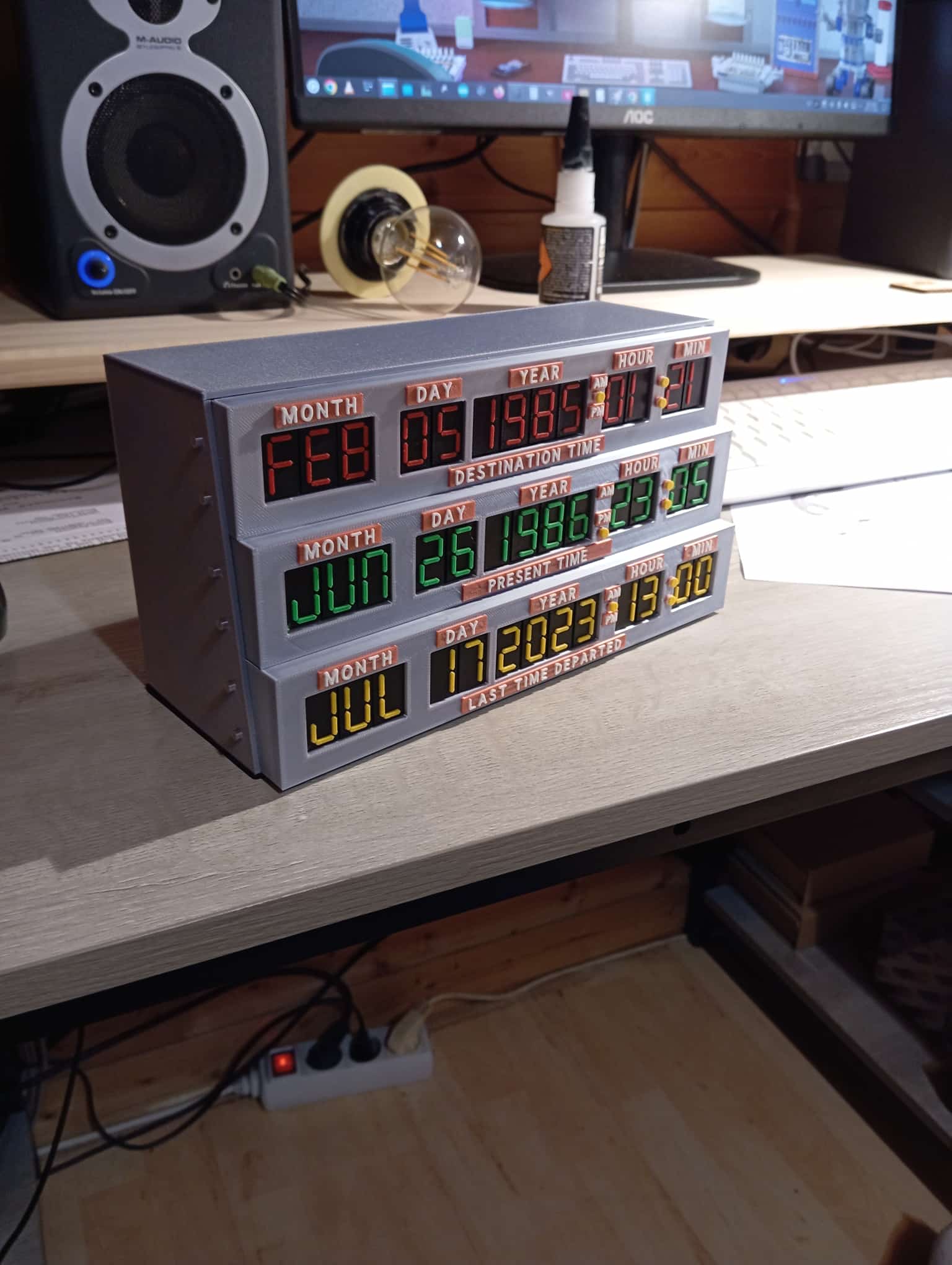
Time Drive Circuit


Dieses Teil aus dem Film Zurück in Zukunft ist der Grund warum ich mich Heute mit Elektrotechnik auskenne. Seit ich die Filme gesehen habe möchte ich das Teil schon nachbauen. Leider ist sehr schwer an 16 Segment Anzeige für den Monat zu kommen. Die Alternative wäre zwei Zahlen für den Monat zu verwenden. Diese Version ist natürlich nur mehrfarbig gedruckt sieht aber trotzdem Super aus in der Sammlung. Wenn ihr gerne andere Daten auf den Displays haben möchtet und es nicht selbst hin bekommt könnt ihr mir gerne schreiben.
Viel Spass, euer Reimecker.
Teile
Bilder
Bilder



Teile








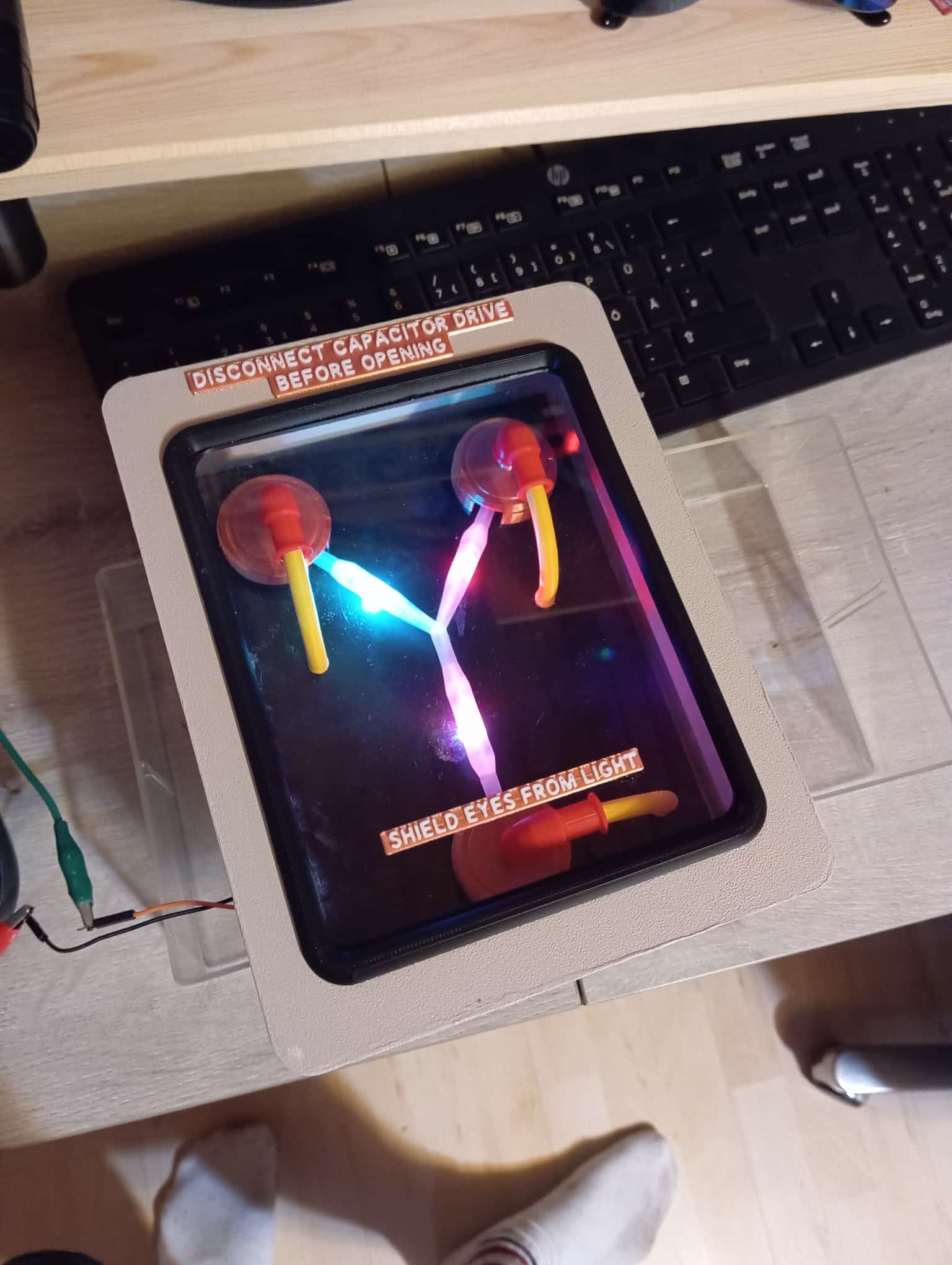
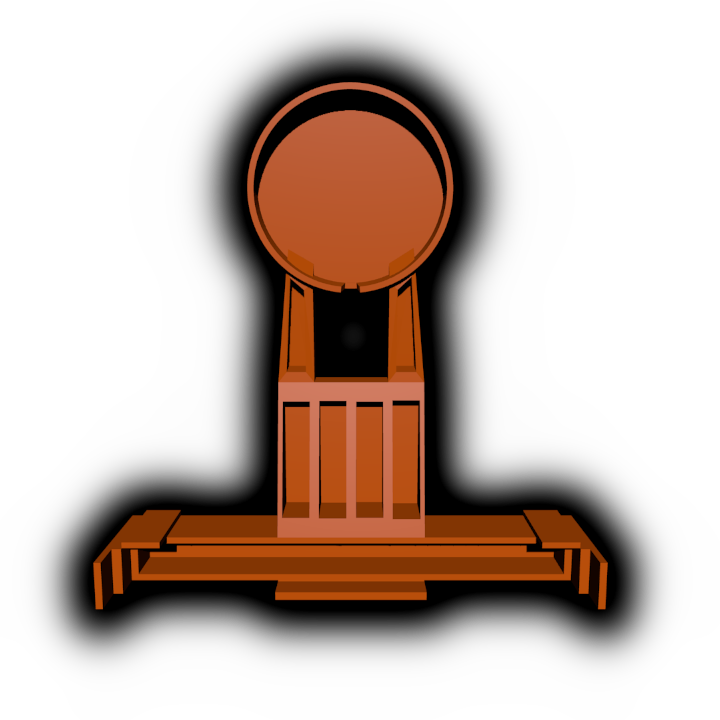
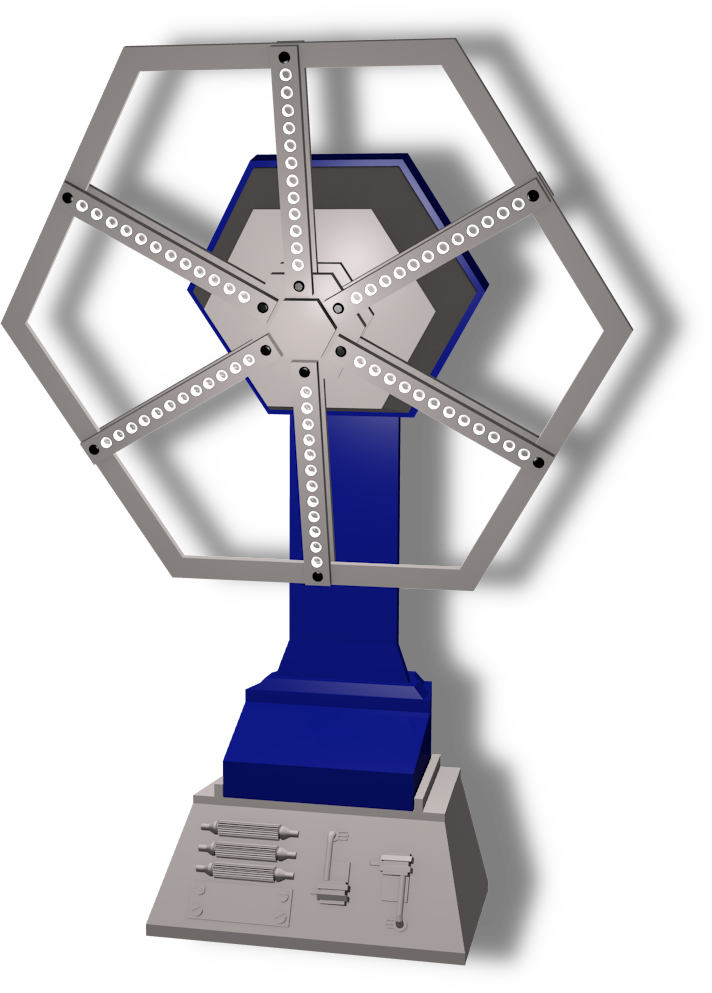
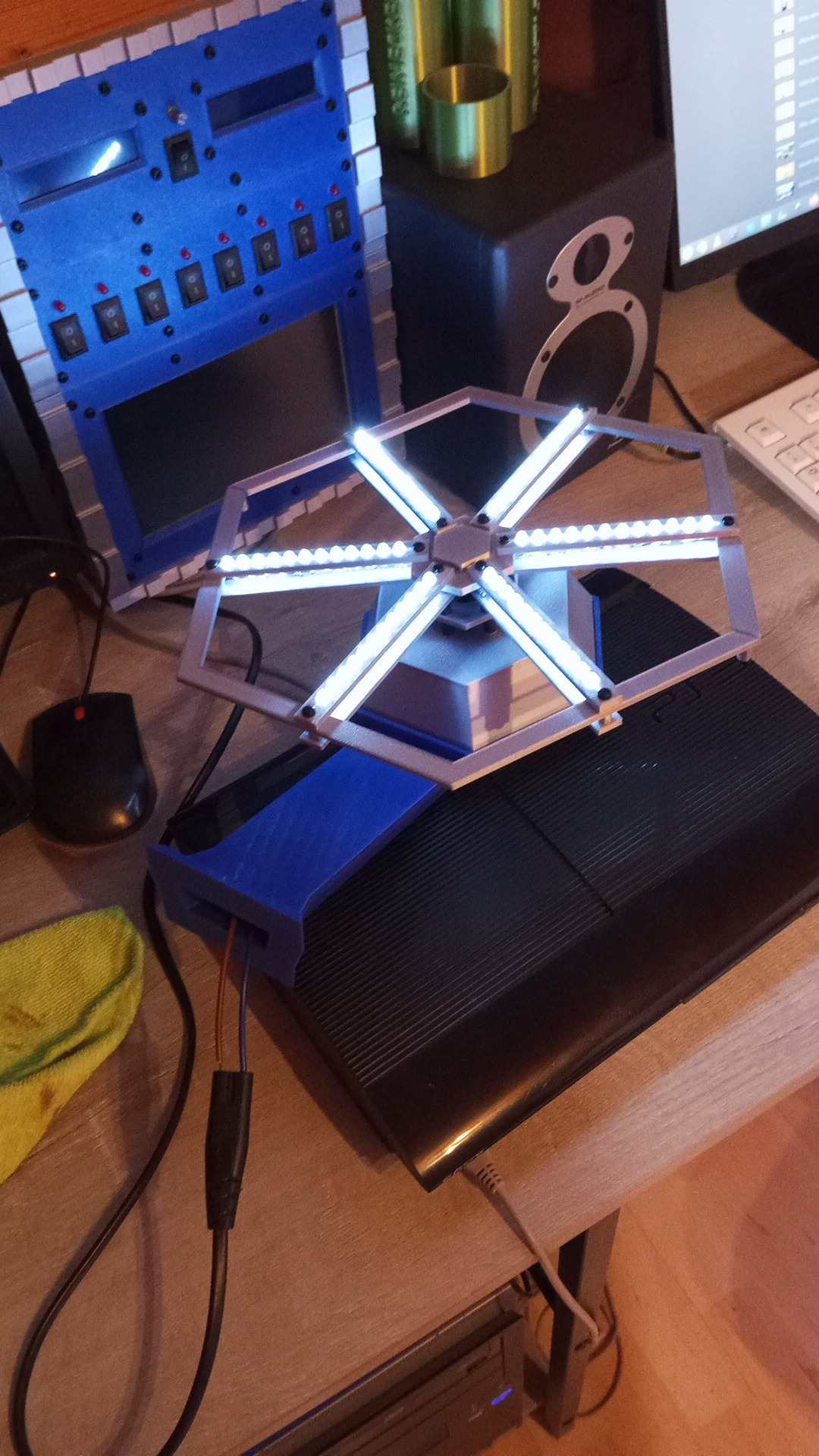
Flux Capacitor


Der Fluxkompensator , bestehend aus einem rechteckigen Fach mit drei blinkenden Geissler-Röhren in Y-Form, wird von Doc als "das, was Zeitreisen ermöglicht" beschrieben. Das Gerät ist die Kernkomponente der Zeitmaschine.
Viel Spass, euer Reimecker.
Teile
Bilder
Bilder









Teile








Videos
,






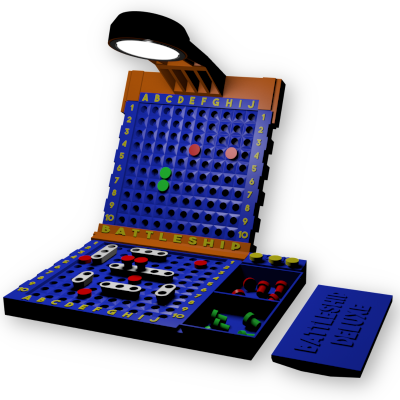
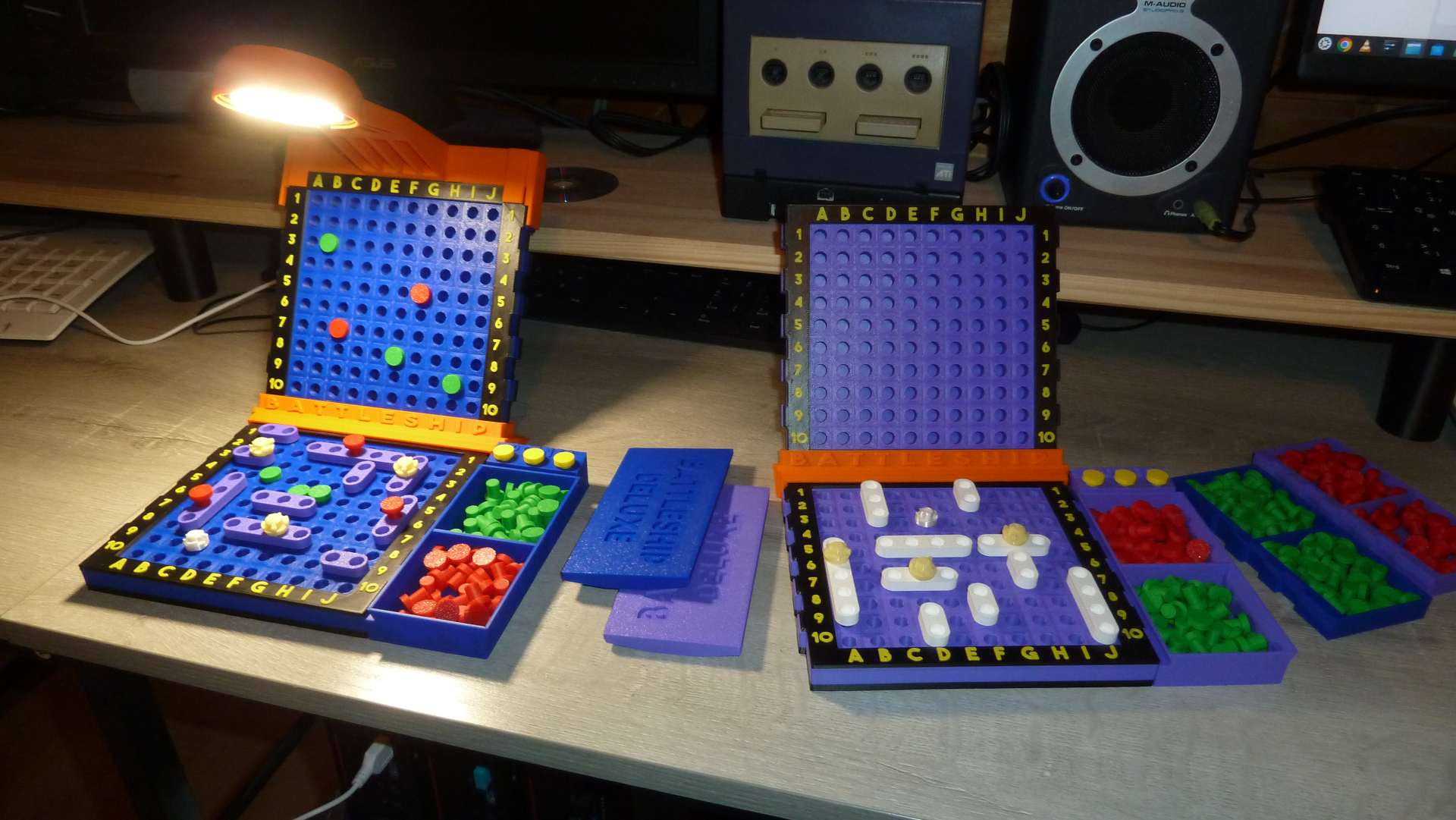
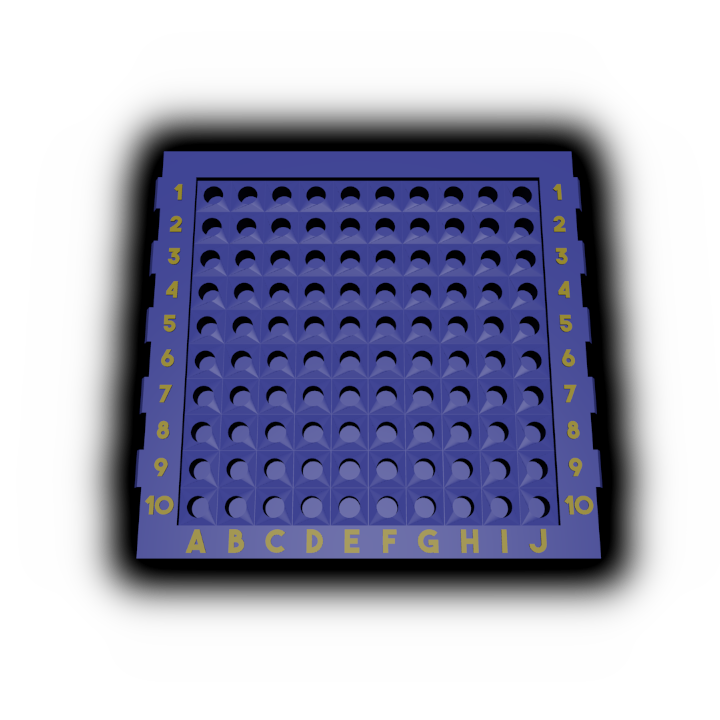
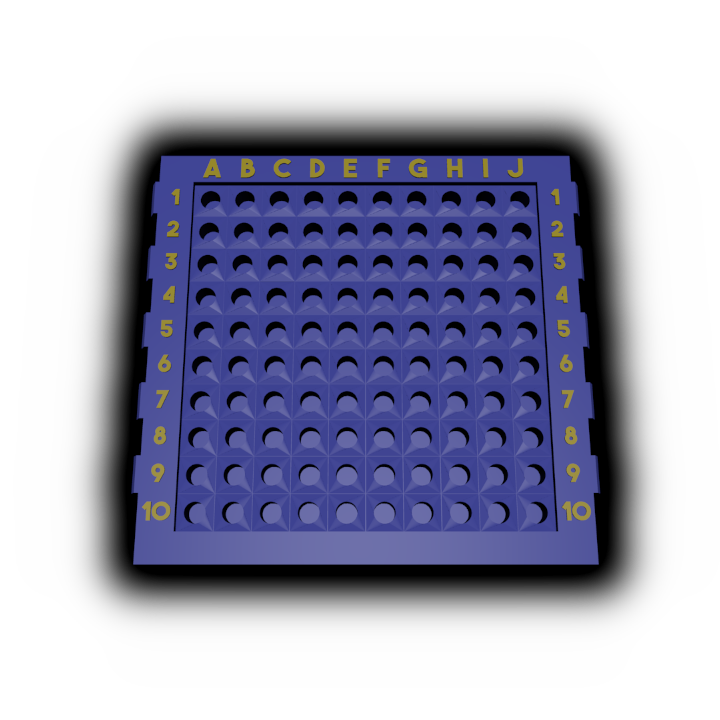
Battleship Deluxe
Hier findet ihr meine eigene Version des Spielklassikers Schiffe versenken.
Schiffe versenken, auch Schiffchen versenken, Flottenmanöver, Kreuzerkrieg oder Seeschlacht genannt, ist ein Spiel,
das klassischerweise mit Zettel und Stift gespielt wird. Es besitzt strategische Elemente, auch wenn man die einfache
Version nicht unbedingt als strategisch relevant bezeichnen kann.
Spielregeln
Schiffe
Spielverlauf
Es wird ausgelost, wer zuerst schiessen darf. Der Schiessende gibt eine Koordinate an, auf die er feuert, zum Beispiel C3.
Der Beschossene sieht auf seinen Plan und antwortet mit Wasser, Treffer oder Treffer, versenkt. Ein Schiff gilt als versenkt,
wenn alle Felder des Schiffes getroffen wurden. Der andere Spieler notiert sich das in seinem zweiten, zu Beginn des Spiels leeren,
10×10-Block. Der Beschossene markiert die Treffer ebenfalls, um zu sehen, wann ein Schiff versenkt ist.
Der weitere Fortgang folgt unterschiedlichen Regeln. Entweder wird abwechselnd geschossen oder so lange, bis ins Wasser getroffen wird.
Es gibt auch Varianten, bei denen jeder nacheinander eine Salve von drei Schüssen abfeuern darf oder bei der jedes noch vorhandene Schiff
jeweils einen Schuss pro Runde abfeuern darf. Wer zuerst alle Schiffe des Gegners versenkt hat, ist der Sieger.
Bilder


Teile


Videos
,


Development System
Videos
,Erweiterungskarten Halter
Videos
,Farben Regal / Palette
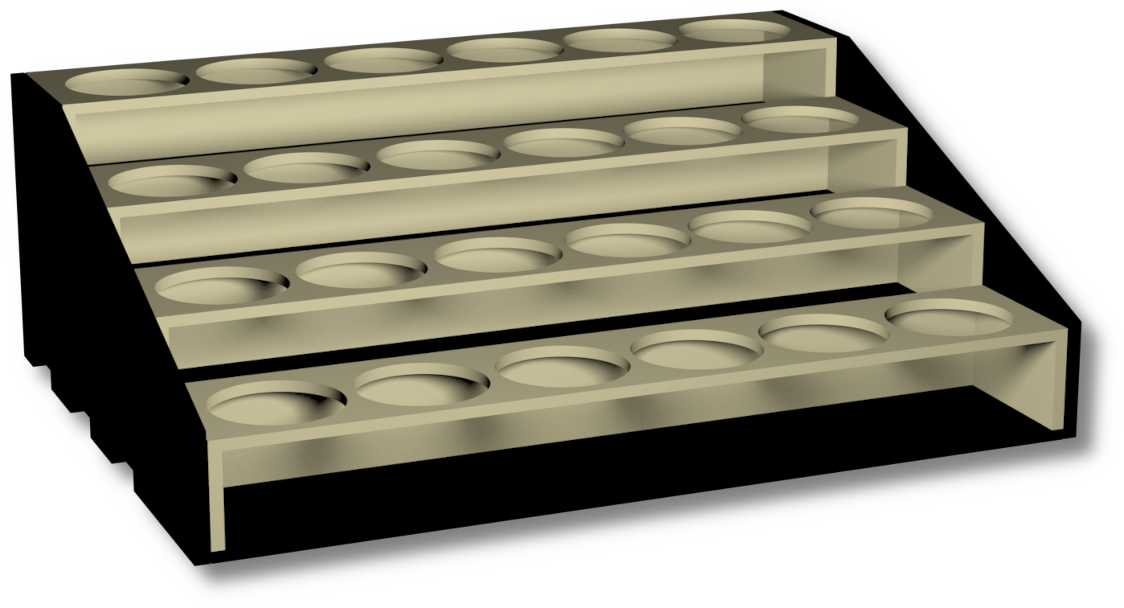
Teile
 |
Reihen Oberteil | Download | View STL |
 |
Reihen Unterteil | Download | View STL |
 |
Seitenteil | Download | View STL |
Bilder


Videos
,| 1 |  | Reimecker TV (Do It Yourself) Farbregal für 24 Farben |
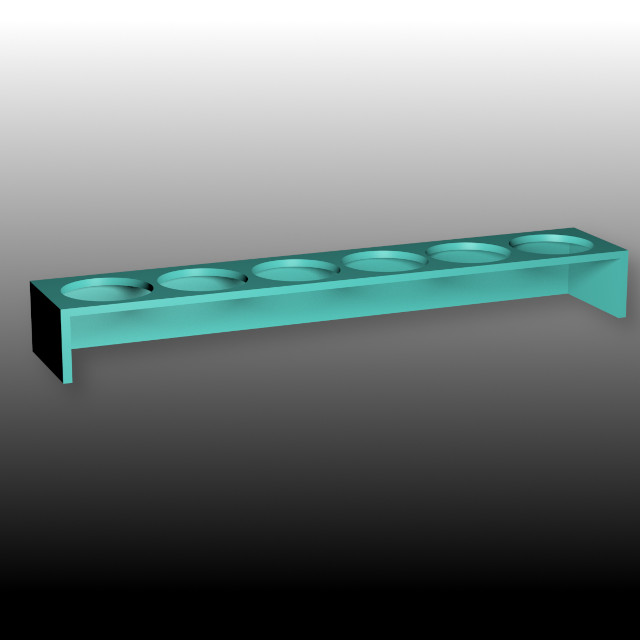
Farben Ständer
Farben Ständer

Videos
,

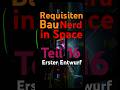
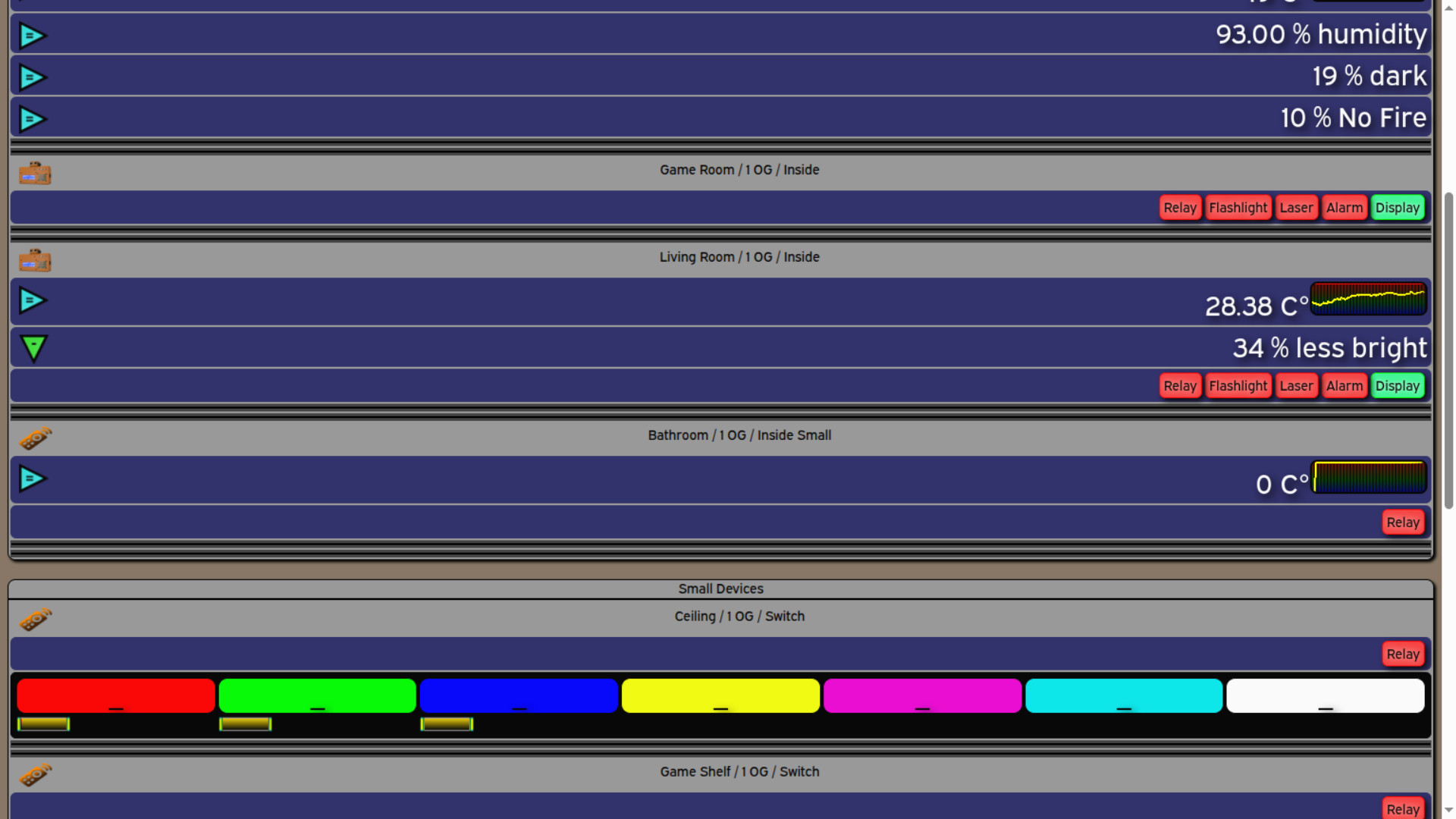
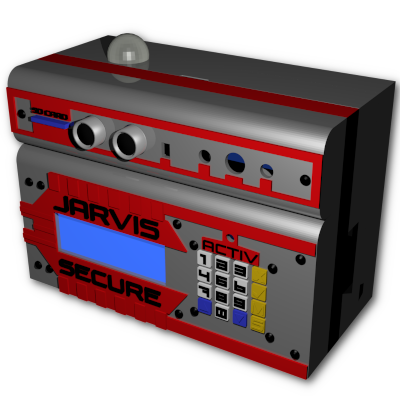
Jarvis - Home Automation
Vorwort
Hardware
Dokumentation
Videos
Download
Vorwort
Hardware
Dokumentation
Videos
In diesem Bereich sind alle Videos die es bisher zu diesem Projekt gibt aufgelistet. Die Sortierung ist von alt zu neu.
Jarvis The virtual presence

Mein Sprachgesteuerter Minecraft Redstone

Home Automation via Atari ST mit jarvis
The Ultimate Smart Home Automation System

- Project Jarvis A.I. Full rendering Level 14

Jarvis Home Automation (Version 2)
Jarvis Home Automation (Version 1)

Project Jarvis Trailer

J.A.R.V.I.S.

Jarvis Home Control - Sicherheitsstation
Jarvis Home Control - Sicherheitsstation

Jarvis Home Control - Sicherheitsstation

Download
Videos
,

Kabel Manager
Kabel Manger
Ich benutzte die Teile für meine Audio Kabel im Tonstudio.
Normal Download STL
Smaller Download STL
Ich benutzte die Teile für meine Audio Kabel im Tonstudio.Normal Download STL
Smaller Download STL
Videos
,| 1 |  | Reimecker TV (Do It Yourself) Kabel Manager |
Lampe Led
Led Stripes


Gehäuse A
An dieses Gehäuse werden die LED Stripes montier. Darin befindet sich auch das Netzteil.
Download STL
Download STL




Videos
,| 1 |  | Reimecker TV (Do It Yourself) Abgefahrene Led Lampe |
Lampe Makerkit


Videos
,Led Spot

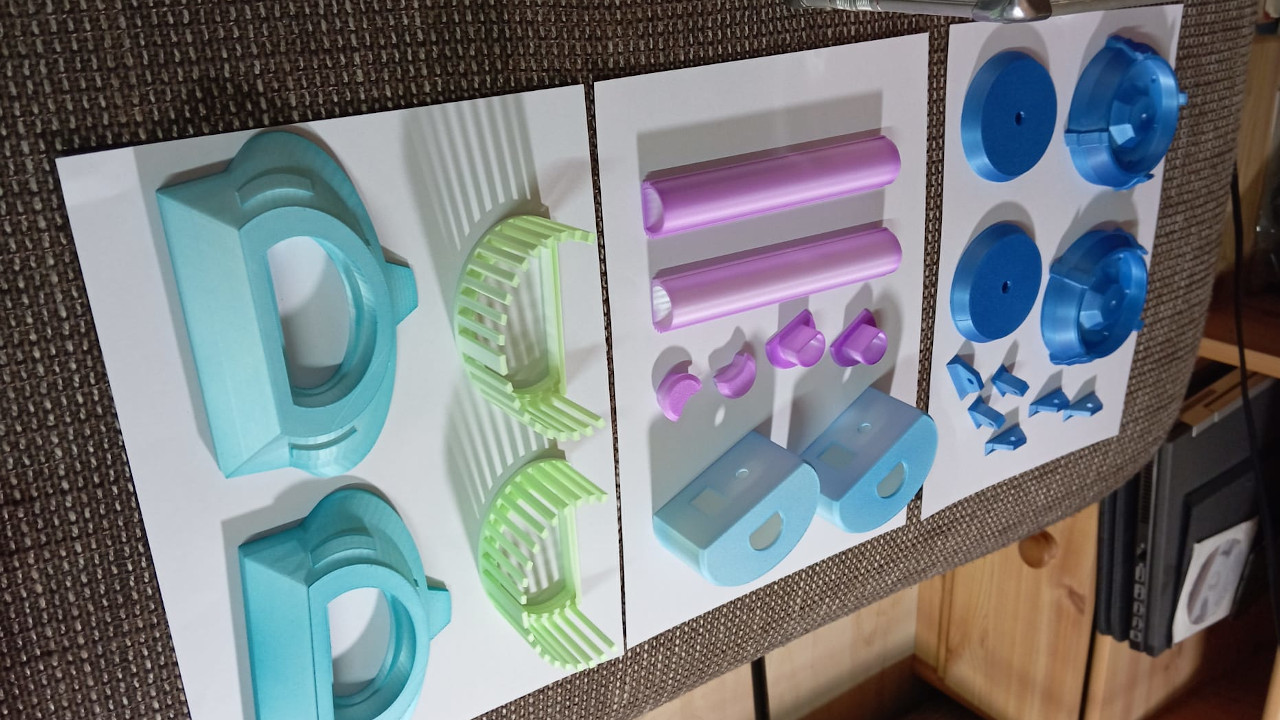
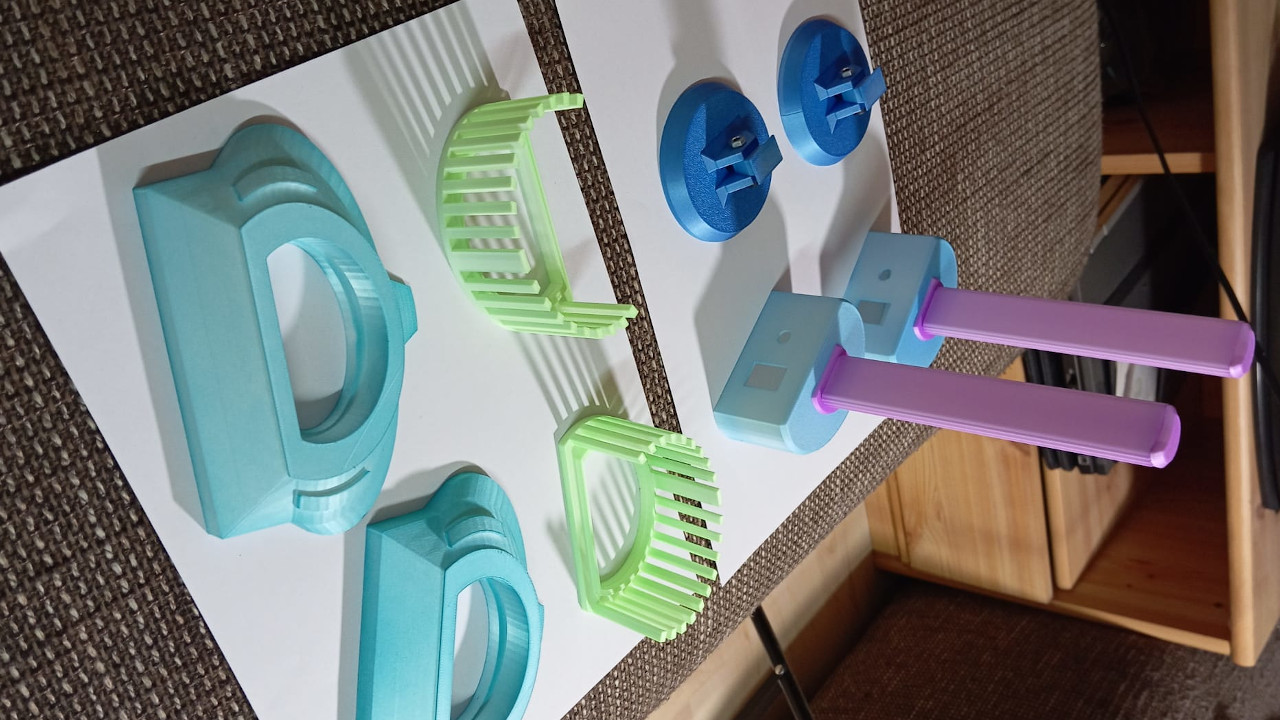
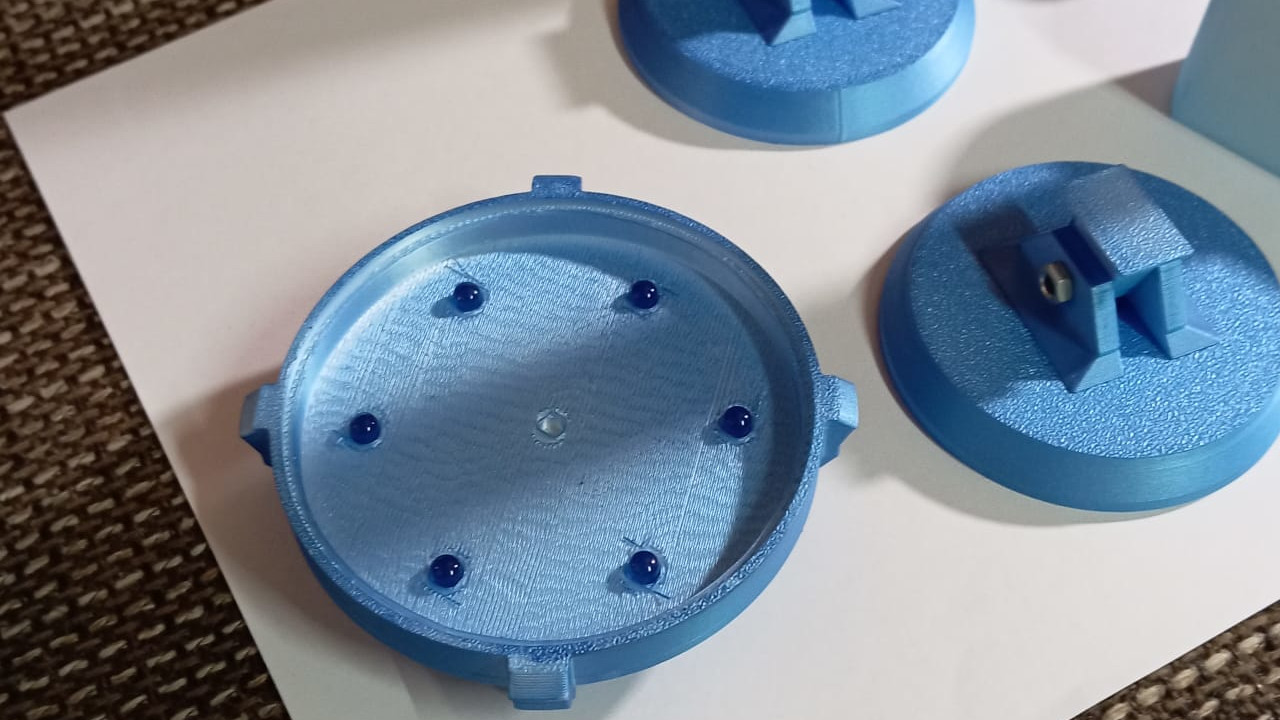
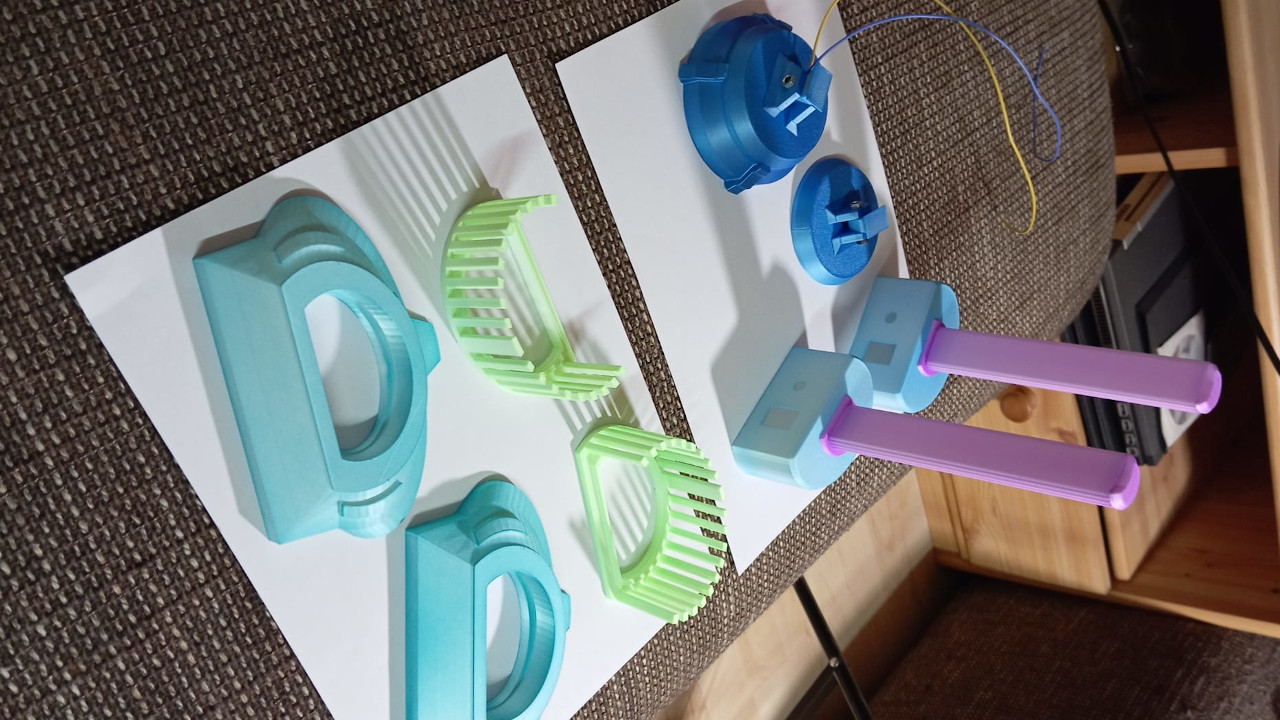
Schaltplan

Teile
 |
Sockel | Download | View STL |
 |
Gehäuse | Download | View STL |
 |
Gehäuse Kuppel | Download | View STL |
 |
Stange | Download | View STL |
 |
Kappe | Download | View STL |
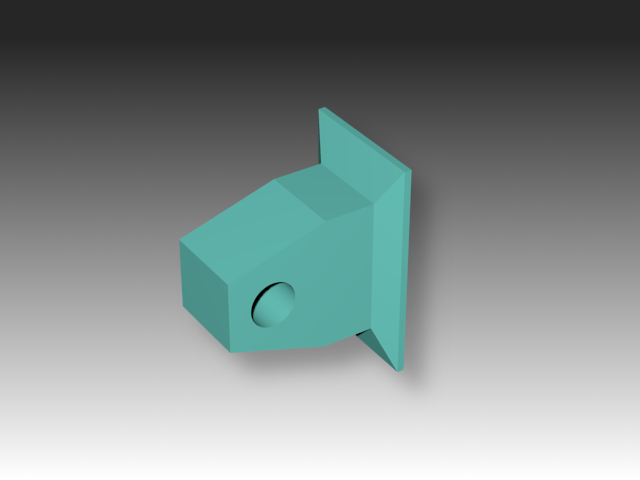 |
Schanier | Download | View STL |
 |
Schanier Halterung | Download | View STL |
 |
Spot Deckel | Download | View STL |
 |
Spot | Download | View STL |
 |
Spot Frontplatte | Download | View STL |
Bilder







Videos
,| 1 |  | Reimecker TV (Do It Yourself) LED Spot für mein Regal |
| 2 |  | Reimecker TV (Do It Yourself) LED Spots lackiert |
Mensch ärger dich nicht

Teile
 |
Spielbrett | Download | View STL |
 |
Figur | Download | View STL |
Videos
,| 1 |  | Reimecker TV (Do It Yourself) Mensch Ärger dich nicht |
Videos
,| 1 |  | Reimecker TV (Do It Yourself) Self Glowing Minecraft Ore |